
Оглавление:


Лемма
- Замечания, сделанные в 3 рассмотренных примерах, поднимают до общего правила и доказывают следующую лемму. Независимо от того, находится ли система материальных точек в равновесии, сумма возможных действий реакций связей в возможных движениях, допускаемых связями, равна zero. В этом случае необходимо исходить из предположения, что трения не существует. Понятно, что достаточно доказать эту лемму для каждого соединения системы. Поэтому мы обратимся к изучению различных типов связей. Мы разделяем их на 2 категории: S 1 соединение корпуса системы с другими неподвижными телами. 2 соединение между основным корпусом системы.
Первая категория, А самый простой случай, когда твердое тело имеет неподвижную точку. Единственное возможное движение это вращение вокруг этой точки. Работа реакции сцепления или реакции неподвижной точки будет равна нулю. Это связано с тем, что точка его приложения не движется при таком движении тела. То же самое происходит, если тело имеет 2 неподвижные точки, то есть оно вращается вокруг неподвижной оси. б предположим, что поверхность s, соединенная с телом системы, скользит без трения о неподвижную поверхность S .Муфты реакции с рис.
Формулы эти применимы к усеченным пирамидам и конусам, а также к частям поверхностей второго порядка и линейчатых поверхностей, заключенных между двумя параллельными плоскостями. Людмила Фирмаль
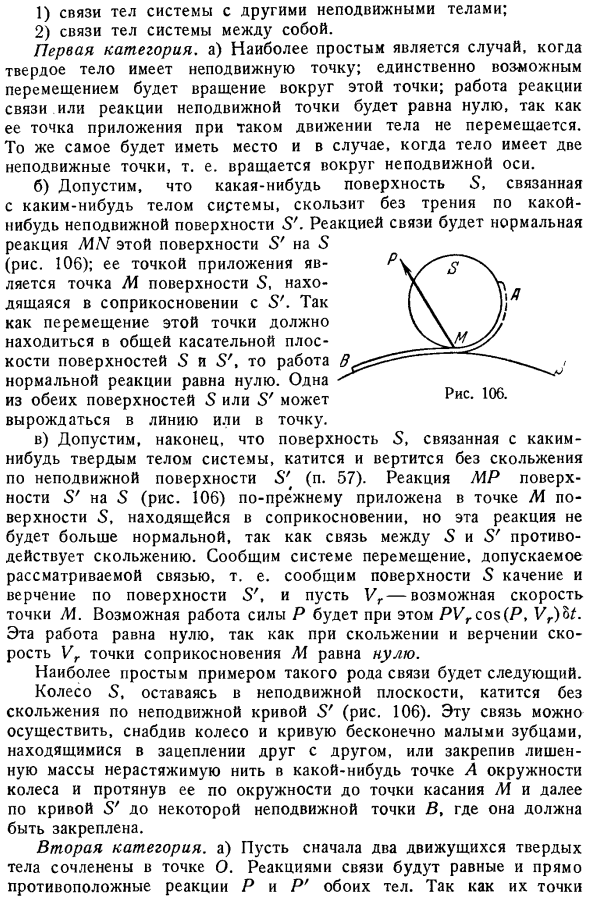
От нормальной реакции MN на этой поверхности. Его точкой приложения является точка L1 поверхности S, находящейся в контакте с S .Смещение этой точки должно быть в пределах общей касательной плоскости поверхности S и S , поэтому нормальная работа реакции равна нулю. Обе поверхности, s или S, могут вырождаться в линии или точки. в Наконец то В системе твердое тело, вращающееся и вращающееся без скольжения по неподвижной поверхности S пункт 57.Поверхностная реакция S L4P рис.106 применяется к точке L1 поверхности S, все еще находящейся в контакте, но эта реакция уже не является нормальной, поскольку соединение между S и S предотвращает проскальзывание.
Проинформируйте систему о перемещениях, допускаемых рассматриваемой муфтой. То есть, сверните поверхность S и поверните ее вдоль поверхности S, сделав Vr возможной скоростью точки M. возможной работой мощности P является PVrcos P, Vr bt. Эта работа равна нулю. Потому что при скольжении и вращении скорость Vr в точке контакта M равна нулю. Простейший пример такого соединения: колесо S, оставшееся в неподвижной плоскости, вращается без скольжения по неподвижной кривой S рис.
Это соединение может быть достигнуто путем оснащения бесконечно малого зуба, который входит в зацепление колеса и кривой друг с другом, или путем фиксации безмассовой нерасширяемой нити в точке А с окружностью колеса, проходящей по окружности до контакта м, и вдоль кривой S некоторой неподвижной точки В, где она должна быть исправлена. 2 я категория, а объединить первые 2 движущихся твердых тела с точкой О. реакция связывания будет равна реакции P и P обоих объектов. Сумма возможных действий этих двух сил равна нулю, так как точки их приложения совпадают со всеми допустимыми перемещениями.
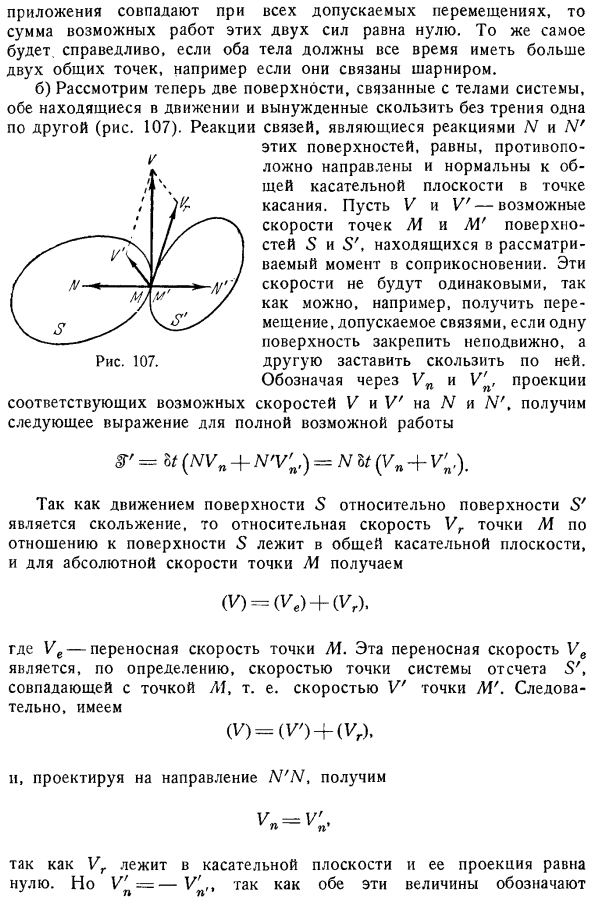
То же самое верно, если оба тела должны всегда иметь 3 или более общих точек, например, когда они соединены шарнирами. б рассмотрим 2 поверхности, соединенные с телом system. It это состояние движения и вынужденного скольжения без трения рис. 107.Реакции этих поверхностей N и N , связывающие реакции равны, направлены в противоположные стороны и перпендикулярны общей касательной плоскости точки контакта. Пусть V и V возможные скорости точек M и M поверхностей S и S, находящихся в контакте в момент решения задачи. Эти скорости не совпадают.
Например, если одна поверхность зафиксирована в неподвижном состоянии, а другая поверхность скользит по этой поверхности, муфта может получить допустимое смещение. VN и проекционный дисплей Скорость V и V в N и V Подходящее возможное следующее выражение для вполне возможной работы = Р НВН н з н. = Гнида ВН + в, Поскольку движение поверхности S к поверхности S является скользящим, относительная скорость точки M к поверхности S Vr находится в общей касательной плоскости, а абсолютная скорость точки В = Ве + ВР. Где Ve полезная нагрузка точки M. эта полезная нагрузка ve, по определению, является скоростью точки системы отсчета S и совпадает с точкой L1.То есть скорость V в точке и.
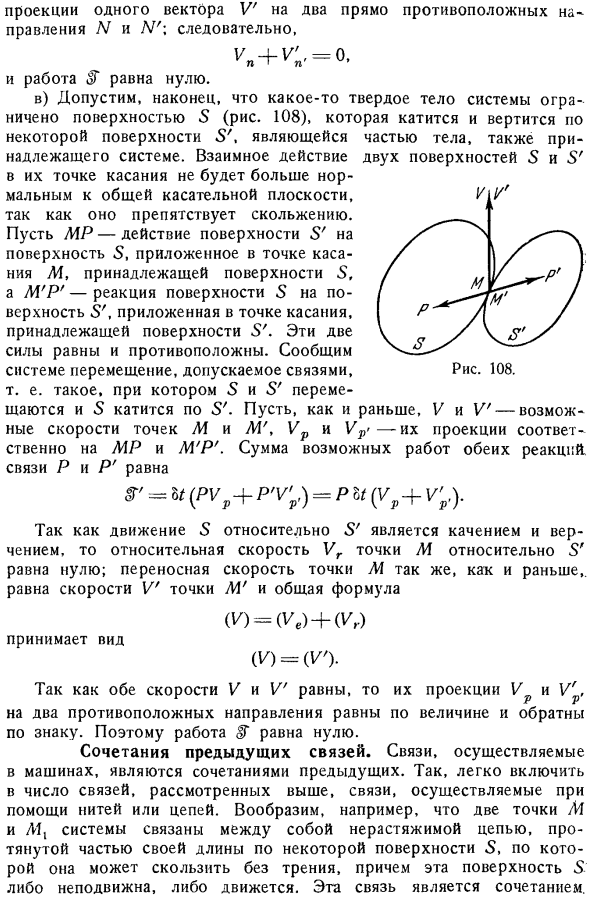
Поэтому мы имеем В = В + ВР. Когда вы проецируете его в направлении N N, он выглядит так: В = г в п В П Потому что Vr находится в касательной плоскости, и его проекция равна нулю. Однако V = V имеет 2 поверхности S и S , поскольку обе эти величины представляют собой n частей тела В 1 проекция вектора V на 2 диаметрально противоположных направления N и LG .И так оно и есть. + =O. работа выхлопных газов равна нулю. В наконец, пусть твердые тела в системе ограничены поверхностью 5 Рис.108 и вращаются и вращаются вдоль поверхности 5 соответствующая система. Взаимодействие в точке контакта не перпендикулярно общей касательной плоскости для предотвращения проскальзывания.
Применяется к поверхности S и M ПРОМАЛЬП применяется к касательной м, принадлежащей поверхности S и M ПРОМАЛЬП применяется к касательной, принадлежащей поверхности S и M ПРОМАЛЬП применяется к поверхности S и M ПРОМАЛЬП применяется к касательной, принадлежащих поверхности s. Эти 2 силы равны и противоположны. Смещения, допускаемые сцеплением, то есть S и S S катится вдоль S. как и прежде, мы предполагаем, что V скорости точек M и L4, Vp и Vp являются проекциями на MR и M p соответственно. Реакция связи P и P это сумма обоих возможных заданий ОГ= 8 +РТ рублей, = Р 8 ур + ур. y Потому что движение S относительно S вращается и вращается.
Тогда относительная скорость Vr в точке M относительно S равна zero. As упомянутая выше переносная скорость точки M является скоростью точки M V и общей формулой n = Ve + Vr принимает вид Ю= И. Поскольку скорости V и V равны, проекции Vp и V p в 2 противоположных направлениях равны по величине и противоположны по знаку. Таким образом, работа 3 будет равна нулю. Сочетание предыдущих отношений. Соединение сделанное на машине сочетание из предыдущее connections. So в описанные выше соединения легко включить соединения, созданные с помощью потоков или цепочек.
Например, представьте, что 2 точки системы, M и L1, соединены между собой цепью, которая тянется вдоль поверхности S и растягивает часть ее длины, по которой она может скользить без friction. In кроме того, эта поверхность S является стационарной или мобильной. Это соединение является комбинацией. Предыдущее звено цепи прочно. Каждая из них соединена вдоль точки или оси со следующими: поверхностью S и контактирующими с ней поверхностями скольжения без трения. Например, 1 из точек, таких как Mlt, всегда может быть соединен с поверхностью 5.Это еще одна связь, которую мы рассмотрели выше. Такие отношения, в частности, включают в себя связь, которая выполняется с помощью блока.
Общее определение идеальных связей. в случае простейшей связи и их комбинации мы обнаружили, что при смещении, ставшем возможным благодаря связи, сумма возможных действий реакции связи будет равна нулю, если только не существует friction. In в случае связи более сложной природы, например, представленной уравнением, эта характеристика рассматривается как само определение понятия отсутствия трения. Связь будет без трения. Или идеально, если сумма реакций связей в движении, допускаемом связями, равна нулю.
- Доказательство принципа. Рассмотрим систему важных точек M2, Mn, которые подчинены данной связи Прогулка под действием непосредственно приложенных сил. Одна из этих точек, M, показана в координатах И X , через Y4 прямая проекция результата Сила, приложенная к нему. Я хотел бы доказать следующее положение: для того чтобы система находилась в равновесии в определенном положении, при сообщении с системой любых возможных перемещений, допускаемых связью, необходимо и достаточно, чтобы сумма возможных действий сил, приложенных непосредственно, была равна нулю. Это условие является necessary.
Дело в том, что при наступлении равновесия каждая точка Mv становится равновесной под действием всех сил, приложенных как к данной реакции, так и к реакции связывания. Точнее, этот пункт можно считать свободным. Однако некоторая сила порождается связью, F и F …Если у вас есть какие либо вопросы, пожалуйста, не стесняйтесь обращаться к нам по адресу url .Точка становится равновесной под действием заданной силы с результирующей f1 и реакцией связи F , F …Для любого возможного движения, сообщенного до этой точки, сумма работы всех этих сил равна нулю.
Это последнее обстоятельство имеет место для части тела вращения, заключенной между двумя плоскостями, перпендикулярными оси, и для объема, ограниченного поверхностью второго порядка и двумя параллельными плоскостями. Людмила Фирмаль
Сумма работы всех сил как на указанном соединении, так и на противодействующем соединении будет равна нулю, если какие либо перемещения будут сообщены, разрешены или нет, путем привязки к точке системы и, следовательно, ко всем точкам системы. ФГДС о = 0. Оригинальная бесфрикционная коммуникация. Термин идеальное соединение в оригинале не используется. Примечание, первичное. Где Gr сумма задач данных сил, а a сумма задач комбинированной реакции.
Однако, если смещение разрешено ограничением, так как на основе предыдущей леммы l равно нулю Гы = 0. Условия достаточно хорошие. Для всех перемещений, допускаемых ограничением, если сумма работы заданной силы равна нулю, система находится в equilibrium. To докажите это, достаточно указать, что если система не находится в равновесии, то будет допущено по крайней мере 1 смещение, в связи с которым Gr не является zero. In дело в том, что если система не находится в равновесии и оставлена на произвол судьбы, то система начинает разрушаться. move.
В этом случае смещение, которое получает точка, допускается связью, и каждая точка Afv, которая считается свободной, имеет все силы Fv, F , F ,…Движется в направлении равнодействующей силы обеих заданных связей reaction. In это фактическое смещение, вся начальная скорость равна нулю. Однако вы можете сказать системе, что каждая точка может двигаться в том же направлении, что и фактическое движение, но не все возможные скорости точки L4U равны нулю. И сумма работы сил 7, F , F , равная результирующей работе над ними, будет иметь положительное значение.
Это происходит потому, что движение происходит в направлении этого результата. Поскольку то же самое происходит в каждой точке системы, сила и реакция связи на смещение, учитываемые в общем задании Gr + Tb, будут положительными ненулевыми значениями, но это смещение будет допускаться bond. So Tl равен нулю Гр 0. Для всех перемещений, допускаемых соединением, если Gr равно нулю, то наступает равновесие. Заметки о работе власти. Анализ различных возможных взаимосвязей показывает 1 бесполезный вопрос для объяснения.
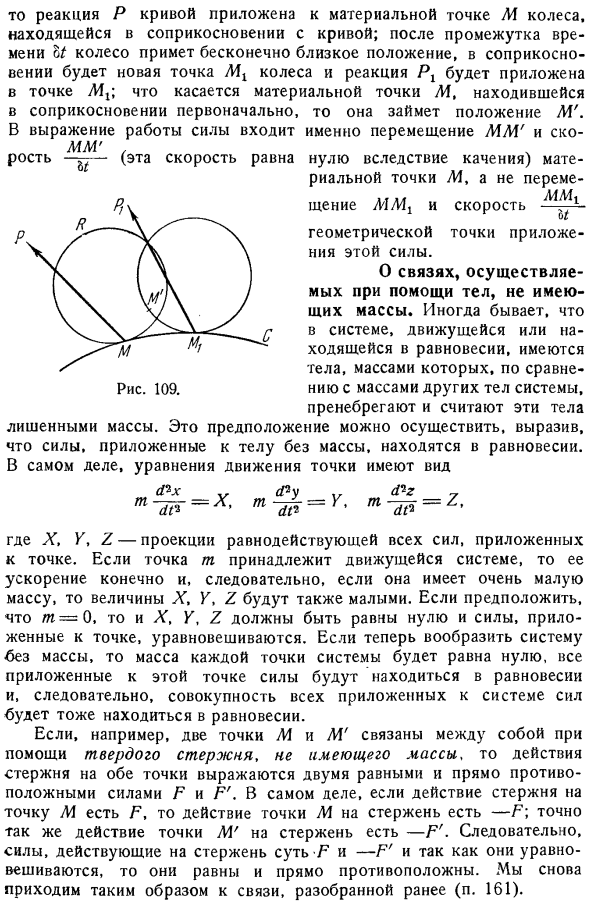
Дело в том, что при расчете основной работы силы не следует смешивать геометрические точки ее приложения с материальными точками, к которым приложена сила, как в возможностях, так и в реальности. О работе начальной школы ФММ, потому что Ф, мм, FVcos Ф, В от Мм и V обозначают бесконечно малые перемещения и скорости материальной точки, к которой приложена сила, а не перемещения и скорости геометрических точек приложения силы. Например, если колесо вращается вдоль неподвижной кривой C рис.109, то реакция P кривой приложена к массе M колеса, находящегося в контакте с кривой.
Через некоторое время Zt колесо принимает бесконечно близкое положение, и когда оно входит в контакт, на колесе появляется новая точка L11, и реактивный Px прикладывается к точке L1X. As ибо важный пункт м, с которым соприкасались в самом начале, занимал позицию ЛГ. Выражение работы силы включает в себя точное движение ILH и Мм охраной. Рост r этот показатель равен Рисунок 109. Ноль при качении это смещение материальной точки 7I , а смещение 1М1 и скорость это не геометрическая точка этой силы. 167.О соединении, сделанном с помощью тела без mass.
Движущаяся система или система, находящаяся в равновесии, при сравнении с массой других тел в системе масса игнорируется, и могут существовать тела, которые считаются этими телами Мессу увезли. Это предположение можно сделать, выразив, что сила, приложенная к телу без массы, находится в equilibrium. In фактически, форма уравнения движения точки имеет вид X, Y, Z проекция равнодействующей силы всех сил, приложенных к точке. Если точка m принадлежит подвижной системе, то ее ускорение конечно, поэтому для очень малых масс величины X, Y, Z также малы. предполагая, что fn = 0, X и Y. Z должно быть равно нулю, и сила, приложенная к точке, сбалансирована.
Если мы представим себе систему без массы, то масса каждой точки в системе будет равна нулю, и все силы, приложенные к этой точке, будут уравновешены, и, следовательно, вся совокупность всех сил, приложенных к системе, также будет уравновешена. Например, если 2 точки M и M соединены сплошным стержнем без массы, то действие стержня в обеих точках представлено 2 равно противоположными силами F и F. на самом деле, если действие стержня на точку M равно F, то действие точки M на стержень равно F.
Аналогично, действие точки M на стержень равно F .в результате силы, действующие на стержень, равны и диаметрально противоположны, потому что они F и F и уравновешены. Поэтому снова перейдите к ранее разобранному соединению пункт 161.Рассмотрим 2 материальные точки M и I , которые не имеют массы и соединены неразъемными нитями на неподвижной или подвижной поверхности 5. Пусть T и T быть действия добавлены в точки А1 и М потоком, и давайте T и T быть добавлены действия потока в этих точках. Следующая сила действует на нить. Сила заканчивается T и G , а часть, контактирующая с поверхностью 5 вертикальной силой, вызванной поверхностной реакцией.
Поскольку нить должна находиться в равновесии, ее натяжение должно быть одинаковым везде и располагаться вдоль геодезических линий поверхности пункт 144. в частности, T = T .Этот тип соединения находится в разобранном соединении выше пункт 163. это дает геометрический результат.
Смотрите также:
Решение задач по теоретической механике
| Точка на кривой | Системы с полными связями |
| Свободное твердое тело | Простые машины |
