
Оглавление:


Корректирующие устройства
- Ортодонтический аппарат Из предыдущего материала наиболее эффективным способом придания автоматизированным системам управления необходимых динамических свойств является введение дополнительных элементов. Измените и измените свойства исходной системы и назовите ее элементом модификации. Этот элемент может быть очень сложным, и в результате также используется термин «коррекция». Устройство. » Таким образом, корректор является функциональным элементом системы автоматического контроля отклонений и обеспечивает динамические характеристики, необходимые для этой системы.
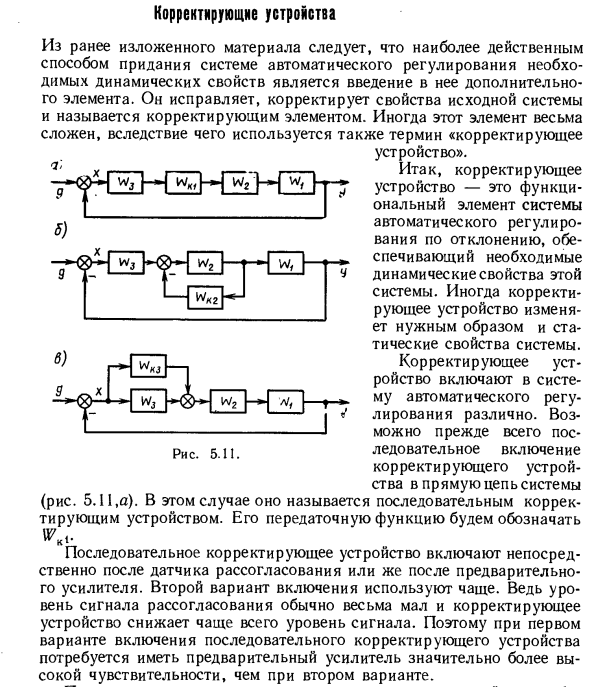
Устройства восстановления могут изменять статические свойства системы по мере необходимости. Корректирующие устройства встроены в автоматизированные системы управления различными способами. Возможно, первое — это включить корректирующие устройства по очереди в прямую цепь системы (рисунок 5.11.0). В этом случае он называется последовательным корректором. Его передаточная функция указана в HV Устройство последовательной коррекции включается сразу после датчика рассогласования или после предварительного усилителя.
Второй вариант включения используется чаще. Людмила Фирмаль
В конце концов, уровень несоответствия сигналов обычно очень мал, и устройства коррекции почти всегда понижают уровень сигнала. Следовательно, в первом варианте осуществления для включения устройства последовательной коррекции требуется предусилитель, имеющий значительно более высокую чувствительность, чем во втором варианте осуществления. Рисунок 5.11. Использование устройства последовательной коррекции наиболее полезно в системах, где управляющим сигналом является напряжение постоянного тока.
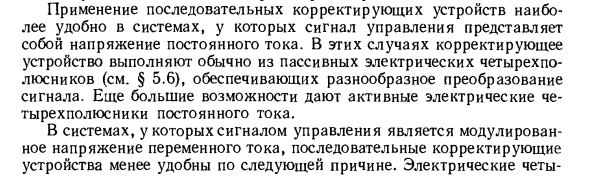
В этих случаях корректирующее устройство обычно состоит из пассивного электрического 4-контактного устройства (см. §5.6), которое обеспечивает различные преобразования сигналов. Активный электрический 4-портовый DC обеспечивает еще большие возможности. В системах, где управляющим сигналом является модулированное переменное напряжение, устройства последовательной коррекции не очень удобны по следующим причинам: Электрическая четверка Обратные полюса переменного тока имеют серьезные недостатки (см. §5.6) и используются редко. Для использования пассивной 4-портовой цепи постоянного тока необходимы дополнительные элементы (рисунок 5.12).
- Модулированный сигнал переменного тока сначала выпрямляется чувствительным к фазе демодулятором ЧР, а затем гармоники фильтруются фильтром F. Только после этого соответствующее преобразование сигнала выполняется 4-полюсным постоянным током (CTD). Преобразованный сигнал постоянного тока преобразуется обратно в сигнал переменного тока, модулированный модулятором М, когда это необходимо для работы последующих элементов в системе. Широкое использование корректирующих устройств Рисунок 5. IID В этом случае рисунок 5.12. Корректирующим устройством является обратная связь, чаще всего отрицательная, охватывающая один из элементов прямой схемы системы.
Такое корректирующее устройство называется параллельным, а его передаточная функция обозначается WKt. Передаточная функция участка цепи с использованием устройства параллельной коррекции W2 = W2 / (\ + W2Wk2). (5,17) В достаточно широком частотном диапазоне, который обычно необходим для качества системы, неравенство | ^ (/ O>) ^ кг (и | »1. (5.18) Тогда в этом диапазоне частот W’2 (/ u>) «1 / No.kg (/ to). (5,19)
Этот элемент обычно является выходным каскадом привода или усилителя (выходного усилителя). Людмила Фирмаль
Следовательно, если выполняется неравенство (5.18), характеристики участка схемы с устройством параллельного исправления определяются только характеристиками этого устройства исправления. Эта ситуация является основным преимуществом устройств параллельной коррекции. Если выполняется неравенство (5.18), характеристики прямого участка W2, охватываемого устройством параллельной коррекции, и их изменения во время работы системы не будут влиять на эту характеристику.
Несущественная нелинейность в этом разделе и изменения ее параметров (коэффициент передаточной функции W2) не влияют на динамические характеристики системы. Это верно только в том случае, если параметры самого устройства параллельной коррекции не изменились. Преимущество этого компенсационного устройства состоит в том, что его вход подключен к выходу исполнительного механизма или усилителя мощности, к выходу мощного элемента с высоким уровнем сигнала.
Поэтому в качестве устройства параллельной коррекции Можно использовать даже достаточно мощные элементы. Тем не менее, пассивные полюсы постоянного тока широко используются. В этом случае очень просто выполнять сложные преобразования сигналов в частях схемы, используя устройства параллельной коррекции. Третий вариант также используется для включения корректирующего устройства в систему, параллельное одному из участков прямой цепи (рис. 5.11, в). Устройство коррекции, включенное таким образом, называется прямой параллелью, а его передаточная функция обозначена WK3. Устройства прямой параллельной коррекции могут быть очень полезны.
Из-за своей низкой сложности необходимый управляющий сигнал может быть преобразован. Например, допустим, W3 = k3 \ WK3 = -kK3 / (Ts + I). Далее передаточная функция схемы с использованием устройства прямой параллельной коррекции W3 = W3 + WK3 = k’3 (T3s + ) / (Ts + 1), i de k’3 = ka до * k8; T’3 = ka T / (k3-kK3). В результате получается реальная вынужденная связь с большой производной постоянной времени для небольшой разности k3 kK3. Уменьшение передаточного числа в этом разделе прямой цепи системы должно быть компенсировано соответствующим увеличением передаточного числа усилителя. Корректирующие устройства выбираются (синтезируются) на основании набора требований, касающихся характеристик системы (см. П. 5.8 — 5.10).
Сначала определяется требуемое значение передаточной функции WKi устройства последовательной коррекции. Далее мы исследуем, может ли такой же эффект быть получен с помощью значения передаточной функции WH2 устройства параллельной коррекции и значения передаточной функции Wk8 устройства прямой параллельной коррекции. После этого уже можно определить, какое устройство модификации является более подходящим для создания. Создайте выражение для такого расчета. Для каждой структурной схемы (рисунок 5.11) построите уравнения для передаточной функции разомкнутой цепи и сделайте эти уравнения эквивалентными друг другу. получить WWKt = W / (1 + Wt WK2) = W (1 + WJW3), (5.20) где W = WtWtW3. Из (5.20) определите формулу перехода от одного типа корректирующего устройства к другому типу корректирующего устройства.
WKi = V (l + W2WK2) = \ + Wk9 / W 3; = (1-KO’W * Ki) = ~ + А? *). (5,21) K * = ^ s-1) — + U72 Gk2). Если значения передаточной функции W и 2 отрицательны, устройство параллельной коррекции должно быть включено. В форме положительных отзывов. Если передаточная функция W,! 3 отрицательная, выходной сигнал устройства параллельной коррекции должен быть вычтен непосредственно из выходного сигнала секции W3. В настоящее время основным способом повышения качества линейной системы непрерывного контроля отклонений является корректирующее устройство.
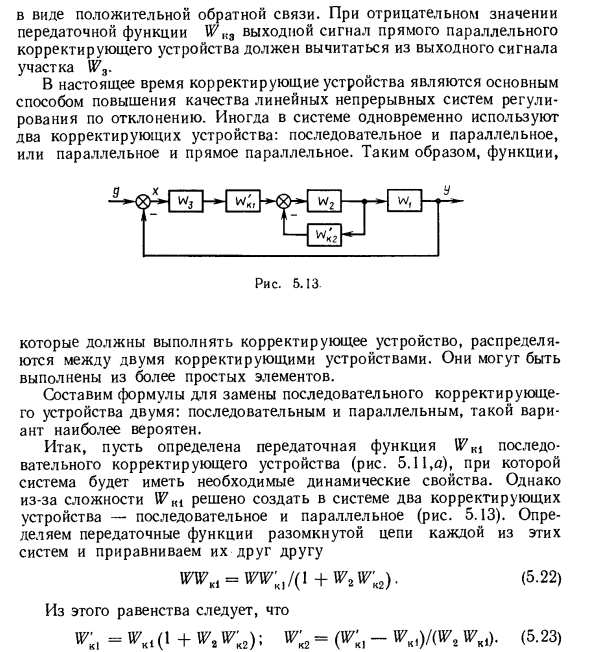
Система может использовать два корректирующих устройства одновременно: последовательное и параллельное или параллельное и прямое параллельное. Поэтому функция Рисунок 5.13 Все, что нужно для запуска устройства исправления, распределяется между двумя устройствами исправления. Вы можете создавать с более простыми элементами. Создайте формулу для замены устройств последовательной коррекции на последовательные и параллельные. Этот вариант почти всегда.
Затем система определяет передаточную функцию WKi последовательного корректора с требуемыми динамическими характеристиками (рис. 5.11, а). Однако из-за сложности WKi было решено создать в системе два корректирующих устройства (последовательное и параллельное) (рисунок 5.13). Определите передаточную функцию разомкнутой цепи каждой из этих систем и сделайте их равными друг другу WWKi = WW’K] / (\ + W2W’K2). (5,22) Из этого равенства WK1 = Gk1 (1 + G, r2); = (WKI-GK,) / (Г2WKi). (5,23) Вы можете выбрать передаточную функцию W’k2 для устройства параллельной коррекции и определить требуемое значение WK1 ‘для передаточной функции для устройства последовательной коррекции из первого уравнения (5.23).
Или, если вы выбираете передаточную функцию W на k1 устройства последовательной коррекции, второе уравнение (5.23) определяет требуемое значение W ′. {2 — передаточная функция параллельного корректора. Аналогично, вы можете создавать выражения для замены устройств последовательной коррекции последовательными и прямыми параллельными или параллельными и прямыми параллельными.
Смотрите также:
Решение задач по теории автоматического управления
| Повышение точности в установившихся режимах | Комбинированное регулирование |
| Обеспечение устойчивости и повышение запаса устойчивости | Преобразовательные элементы |
