
Оглавление:
Готовые контрольные работы по теории автоматического управления (ТАУ).
Современная теория управления занимает одно из ведущих мест в технических науках и в то же время относится к одной из отраслей прикладной математики. С другой стороны, теория и практика автоматического управления связаны с вычислительной техникой.
ТАУ является теоретической базой в цикле специальных дисциплин, раскрывающих теоретические основы и методы расчета, анализа и синтеза средств и систем автоматизации управления техническими системами.
Задачи курса ТА У состоят в изучении методов построения технических систем управления, овладении студентами методами анализа и синтеза систем и приобретении навыка расчета основных качественных показателей динамики автоматических средств контроля и управления.
| Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу! |

Теория автоматического управления
Теория автоматического управления (ТАУ) — это наука, которая изучает процессы управления и проектирования автоматических систем, работающих по замкнутому циклу. Иначе говоря, она изучает любые системы с обратной связью.
Контрольная работа №1.
Линеаризовать уравнение характеристики элемента умножения  в точке
в точке  .
.
Решение:
В соответствии с малыми приращениями


пренебрегая малыми высшего порядка. Тогда вычитая значение  из левой и правой частей, получим
из левой и правой частей, получим

т.е. элемент умножения может быть приближенно представлен в виде сумматора и двух усилителей (линейных звеньев).
Возможно эта страница вам будет полезна:
| Предмет теория автоматического управления |
Контрольная работа №2.
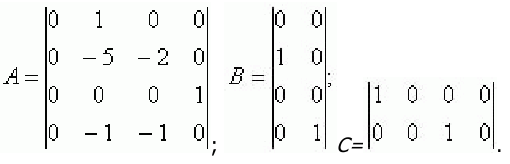
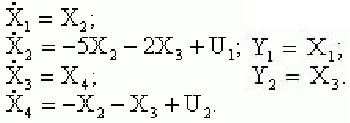
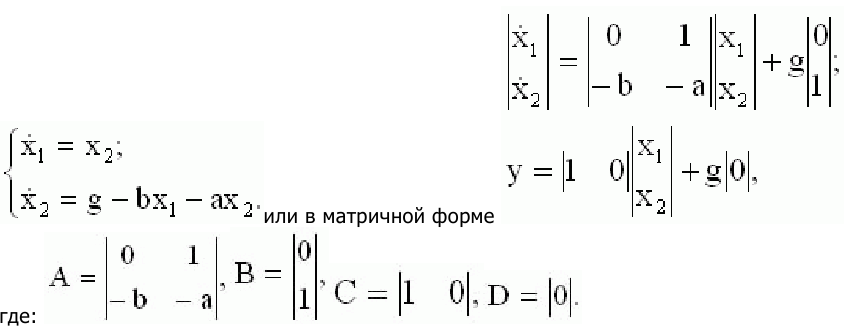
Написать уравнения состояния и построить электронную модель системы, имеющей матрицы состояния:
Решение:
В соответствии с матрицами  и
и  уравнения состояния запишем в виде:
уравнения состояния запишем в виде:
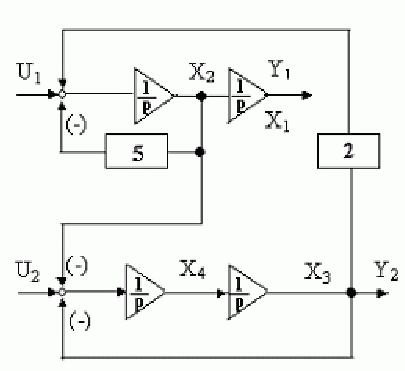
Тогда электронная модель с использованием идеальных интеграторов и усилителей будет иметь вид:
Контрольная работа №3.
Начертить блок-схему и написать уравнения состояния системы, описываемой дифференциальным уравнением  , где
, где  — входная величина;
— входная величина;  — выходная величина.
— выходная величина.
Решение:
Разрешим уравнение относительно старшей производной — 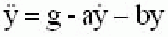 и составим блок- схему ее получения рис.1
и составим блок- схему ее получения рис.1
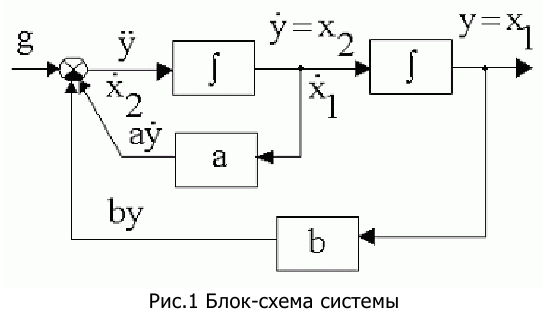
В соответствии с выбранными переменными состояния на рис.2.8 запишем уравнения в нормальной форме
Контрольная работа №4.
Построить л.а.х. и л.ф.х. системы, описываемой передаточной функцией

Решение:
Представим передаточную функцию в виде произведения элементарных звеньев

Низкочастотный участок л.а.х. пойдет с наклоном 0 дБ/дек на уровне 20  100= 40 дБ. Частоты сопряжения для апериодических составляющих будут соответственно
100= 40 дБ. Частоты сопряжения для апериодических составляющих будут соответственно  и
и  . Фазочастотная характеристика строится в соответствии с уравнением
. Фазочастотная характеристика строится в соответствии с уравнением 
 . Ниже представлены графики л.а.х. и л.ф.х., соответствующие заданной передаточной функции.
. Ниже представлены графики л.а.х. и л.ф.х., соответствующие заданной передаточной функции.

Контрольная работа №5.
Определить передаточную функцию минимально-фазового устройства, л.а.х. которого представлена ниже
Решение:
Двигаясь по л.а.х. в направлении возрастания частоты определяем, что звено принадлежит к дифференцирующему типу, т.к. наклон низкочастотного участка равен +20дБ/дек (+1). Передаточная функция равна  . При частоте излома л.а.х.
. При частоте излома л.а.х.  наклон меняется на -20дБ/дек (-1). Очевидно добавлены два звена с передаточной функцией
наклон меняется на -20дБ/дек (-1). Очевидно добавлены два звена с передаточной функцией 
Тогда суммарная передаточная функция, соответствующая заданной л.а.х. будет иметь вид
Контрольная работа №6.
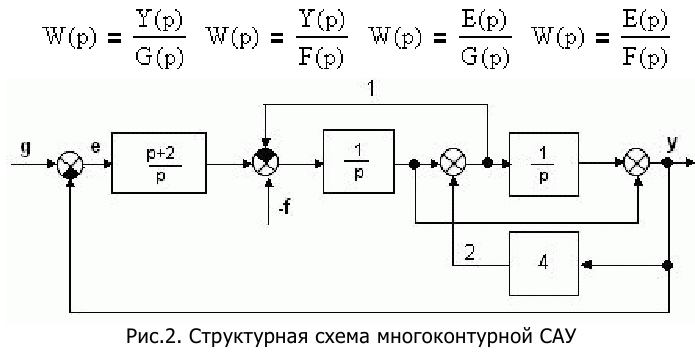
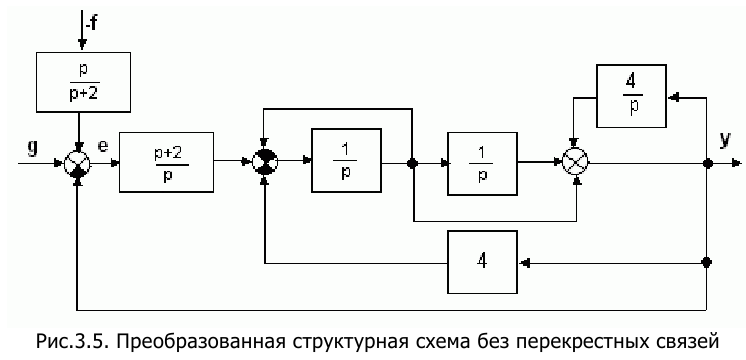
Пользуясь правилами структурных преобразований привести представленную на рис.3.4. структурную схему замкнутой многоконтурной системы к одноконтурной и найти передаточные функции:
Решение:
Перед тем, как находить передаточные функции необходимо освободиться от перекрестных связей 1 и 2 на рис.3.4, для чего необходимо перенести или узел, или сумматор с добавлением соответствующих звеньев. Кроме того, целесообразно привести возмущающее воздействие  ко входу САУ. Тогда получим схему на рис.3.5.
ко входу САУ. Тогда получим схему на рис.3.5.
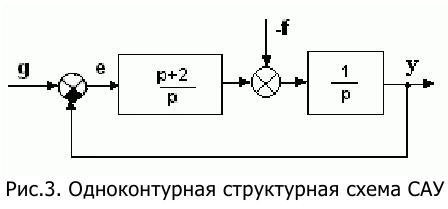
Пользуясь правилами структурных преобразований свернем внутренние контура и получим одноконтурную замкнутую САУ на рис.3.
Тогда требуемые передаточные функции замкнутой САУ запишем в виде:
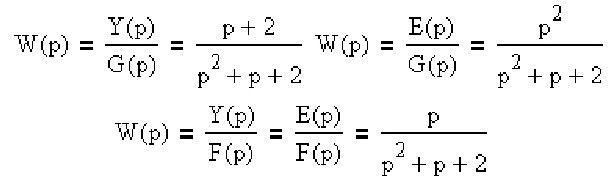
Найденные с помощью правил структурных преобразований передаточные функции позволяют достаточно просто определить временные и частотные характеристики, а так же получить качественные и количественные оценки динамики и статики САУ.
Контрольная работа №7.
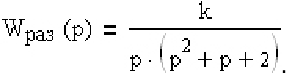
Определить критический коэффициент усиления Ккр системы, разомкнутая передаточная функция которой
Решение:
Найдем характеристическое уравнение замкнутой системы


Для системы третьего порядка граница устойчивости из определителя (минора) определятся правилом: произведение средних членов характеристического уравнения равно произведению крайних при положительном первом члене, т.е.  . Откуда
. Откуда  .
.
Контрольная работа №8.
Определить количество правых корней  системы третьего порядка, годограф Михайлова которой имеет вид
системы третьего порядка, годограф Михайлова которой имеет вид
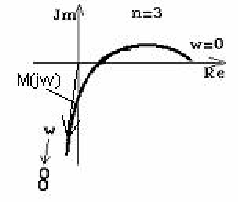
Peшeние. Из рисунка видно, что при изменении частоты от 0 до  суммарный угол поворота годографа Михайлова равен —
суммарный угол поворота годографа Михайлова равен — . Тогда в соответствии с формулой (4.3)
. Тогда в соответствии с формулой (4.3)

Откуда число положительных корней = 2.
Контрольная работа №9.
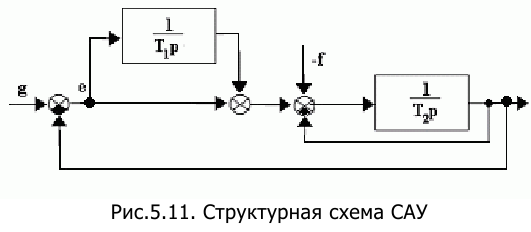
Определить порядки астатизма по управляющему  и возмущающему
и возмущающему  воздействиям САУ, структурная схема которой приведена на рис.5.11.
воздействиям САУ, структурная схема которой приведена на рис.5.11.
Решение:
Сначала необходимо привести исходную структурную схеме к одноконтурной, как показано на рис.5.12.
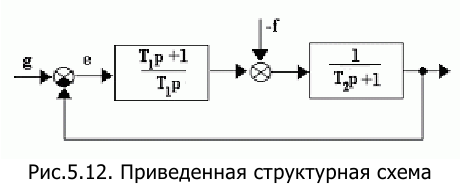
Из рис. 5.12 видно, что при охвате идеального интегратора отрицательной обратной связью получается апериодическое звено 1-го порядка. Поэтому пользуясь правилом определения порядка астатизма, приведенным выше, можно заключить, и по управляющему, и по возмущающему воздействию астатизм равен 1.
Контрольная работа №10.
Определить предельное значение коэффициента передачи  нелинейного элемента из условия обеспечения абсолютной устойчивости нелинейной системы, передаточная функция линейной части которой
нелинейного элемента из условия обеспечения абсолютной устойчивости нелинейной системы, передаточная функция линейной части которой
Решение:
Амплитудно-фазовая характеристика линейной части

Тогда видоизмененная частотная характеристика

Изменяя частоту от 0 до  построим видоизмененную частотную характеристику (рис.7.4).
построим видоизмененную частотную характеристику (рис.7.4).
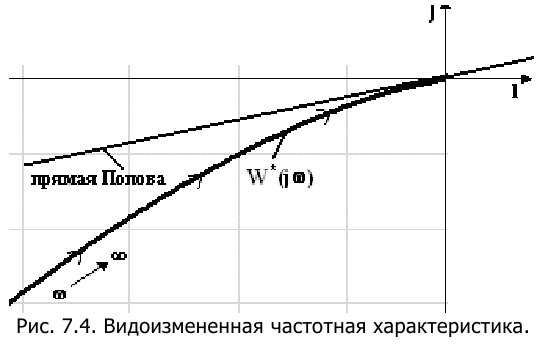
Вся характеристика  располагается во втором квадранте, поэтому линию (прямую) Попова предельную (наиболее близко подходящую к началу координат) можно провести через начало координат. В этом случае будет выполнятся условие, что вся видоизмененная а.ф.х.
располагается во втором квадранте, поэтому линию (прямую) Попова предельную (наиболее близко подходящую к началу координат) можно провести через начало координат. В этом случае будет выполнятся условие, что вся видоизмененная а.ф.х.  будет
будет
находится справа от прямой Попова. И предельный коэффициент нелинейного элемента  находится из условия
находится из условия  , т.е. нелинейность для обеспечения абсолютной устойчивости может располагаться в угле
, т.е. нелинейность для обеспечения абсолютной устойчивости может располагаться в угле  .
.
Контрольная работа №11.
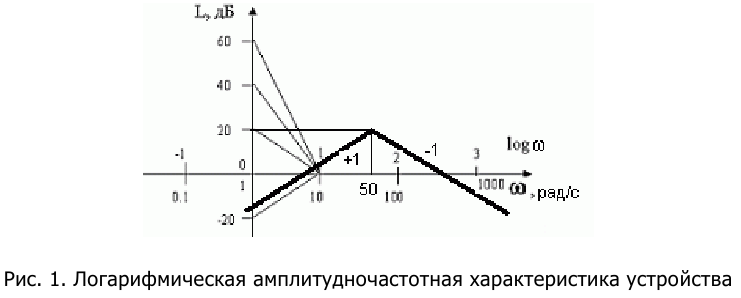
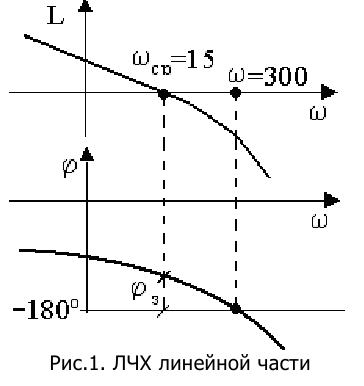
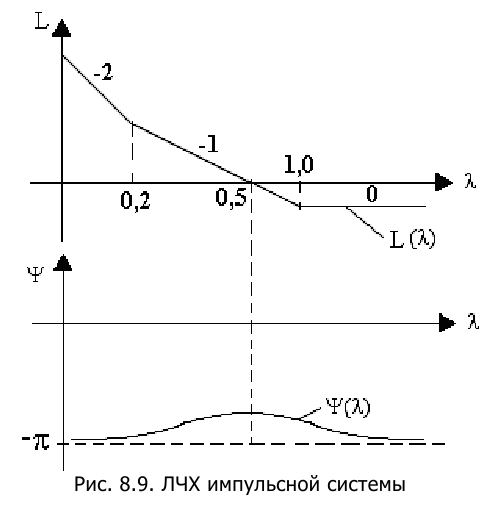
Определить возможную частоту автоколебаний при введении в САУ, имеющей ЛЧХ вида (рис.1), однозначной нелинейности в виде двухпозиционного реле.
Решение:
Известно, что характеристика —  однозначного нелинейного элемента (двухпозиционного реле) полностью располагается на отрицательной действительной полуоси, поэтому а.ф.х. линейной части
однозначного нелинейного элемента (двухпозиционного реле) полностью располагается на отрицательной действительной полуоси, поэтому а.ф.х. линейной части  может ее пересечь только при угле -180°. Частота возможных автоколебаний определяется по , а л.ф.х. (рис.7.8) показывает, что фазовый угол сдвига -180° происходит на частоте
может ее пересечь только при угле -180°. Частота возможных автоколебаний определяется по , а л.ф.х. (рис.7.8) показывает, что фазовый угол сдвига -180° происходит на частоте  = 300 рад/с. Это и есть возможная частота автоколебаний при введении в САУ однозначной нелинейности.
= 300 рад/с. Это и есть возможная частота автоколебаний при введении в САУ однозначной нелинейности.
Контрольная работа №12.
Изобразить фазовые траектории для нелинейной системы с тремя различными нелинейностями — двухпозиционное реле, трехпозиционное реле с зоной нечувствительности (±0,2) и двухпозиционное реле с гистерезисом (±0,1), если линейная часть имеет передаточную функцию
примем для всех нелинейностей величину сигнала на выходе реле ±2.
Решение:
В соответствии с заданием модель нелинейной системы можно представить в виде рис.7.10.
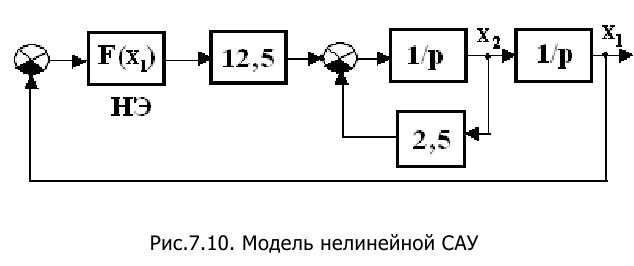
Модель нелинейной САУ Тогда уравнения состояния (7.9) запишутся в виде
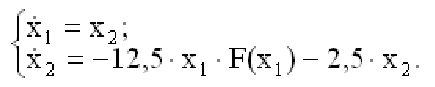
Разделив второе из уравнений на первое, получим уравнение фазовой траектории
В зависимости от того, с какой стороны от линии переключения реле находится изображающая точка, решения дифференциального уравнения будут следующие [2]:
справа от линии переключения при


слева от линии переключения при


для трехпозиционного реле движение изображающей точки в пределах зоны нечувствительности
соответствует уравнению

где  — постоянные интегрирования, зависящие от начальных условий. На рис. 7.11 изображены фазовые траектории нелинейной САУ с различными нелинейными элементами. Припасовывание или сшивание участков фазовых траекторий происходит по линиям переключений.
— постоянные интегрирования, зависящие от начальных условий. На рис. 7.11 изображены фазовые траектории нелинейной САУ с различными нелинейными элементами. Припасовывание или сшивание участков фазовых траекторий происходит по линиям переключений.
Контрольная работа №13.
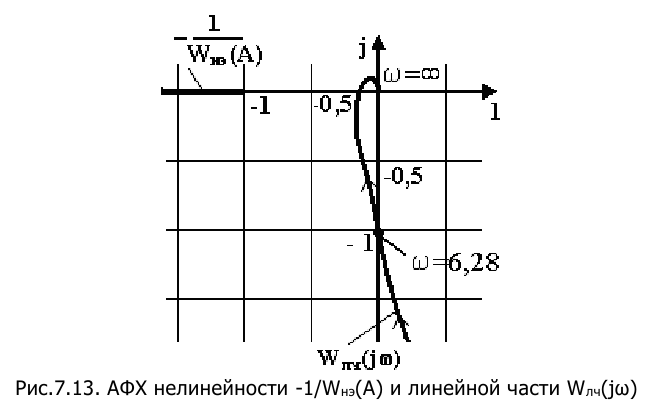
На рис.7.13 представлены  . Кроме того в нее вводится звено чистого запаздывания. Определить критическое время чистого запаздывания, при котором в нелинейной системе возникают автоколебания.
. Кроме того в нее вводится звено чистого запаздывания. Определить критическое время чистого запаздывания, при котором в нелинейной системе возникают автоколебания.
Решение:
Известно, что звено чистого запаздывания меняет только фазовый сдвиг и не меняет амплитуду сигнала. Ближайшее расстояние АФХ обратной передаточной функции нелинейного элемента от начала координат равно (-1). Модуль АФХ линейной части, равный единице, приобретает свое значение на частоте  . Запас по фазе равен
. Запас по фазе равен 
 . Тогда
. Тогда  .
.
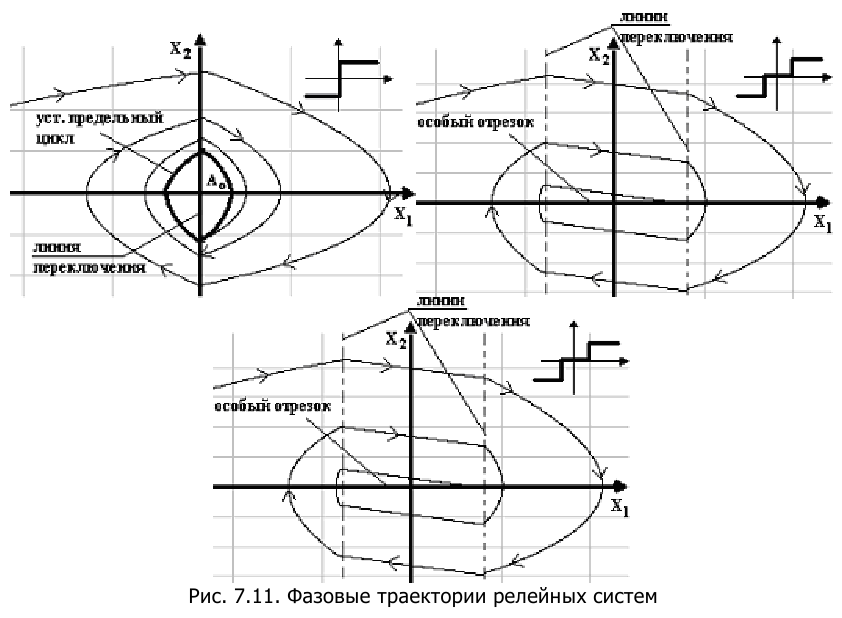
Анализируя фазовые траектории, можно сделать следующие выводы:
- при взятых начальных условиях все системы устойчивы. Причем системы с двухпозиционными реле устойчивы «в большом»;
- у систем с двухпозиционными реле наблюдаются устойчивые колебания. Абсцисса предельного цикла определяет амплитуду колебаний
 , а частота может быть определена из ординаты предельного цикла
, а частота может быть определена из ординаты предельного цикла  ;
; - система с трехпозиционным реле с зоной нечувствительности имеет «особый отрезок». Система может после прохождения переходного процесса занять любое значение внутри зоны нечувствительности, как показано на рис.7.11.
Контрольная работа №14.
Определить дискретную передаточную функцию системы, непрерывная часть которой состоит из ПИ — регулятора и нейтрального объекта
а в качестве импульсного элемента используется экстраполятор нулевого порядка и экстраполятор с АИМ 1-го рода. Принять период дискретности  , общий коэффициент усиления
, общий коэффициент усиления  , постоянную времени
, постоянную времени  , импульсы длительности
, импульсы длительности  .
.
Решение:
В соответствии с формулой (8.7) передаточная функция цифровой системы (экстраполятор нулевого порядка)

В соответствии с таблицами  — преобразований [2,6] находим
— преобразований [2,6] находим

В соответствии с формулой (8.10) передаточная функция импульсной системы (экстраполятор с АИМ 1-го рода)

В соответствии с таблицами — преобразований находим

Как видим, передаточные функции импульсной системы в значительной степени зависят от вида и параметров экстраполяторов, что необходимо
Контрольная работа №15.
Построить логарифмические частотные характеристики импульсной системы с экстраполятором нулевого порядка, период дискретности которой , а передаточная функция непрерывной части
Решение:
Выбираем частоту среза  . В соответствии с заданными постоянными времени для непрерывной части определяем сопрягающую частоту
. В соответствии с заданными постоянными времени для непрерывной части определяем сопрягающую частоту  -низкочастотный диапазон.
-низкочастотный диапазон.
В соответствии с уравнением (8.18) передаточная функция от псевдочастоты будет иметь вид:
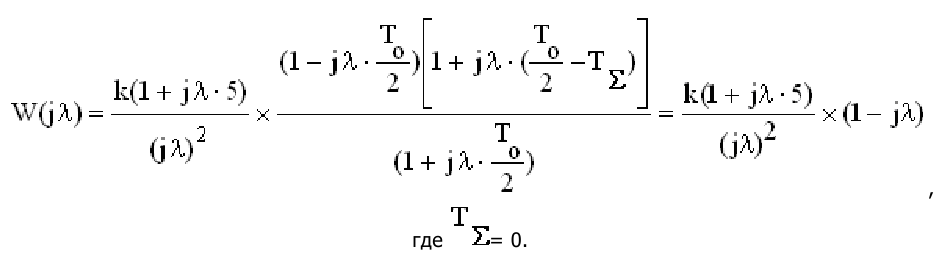
В соответствии с уравнением (8.19) фазочастотная характеристика будет иметь вид:

На рис.8.9 представлены асимптотические ЛЧХ, соответствующие

Коэффициент усиления  может быть выбран из условия прохождения среднечастотного участка через
может быть выбран из условия прохождения среднечастотного участка через  с наклоном -20 дБ/дек.
с наклоном -20 дБ/дек.
Контрольная работа №16.
Дать заключение об устойчивости импульсной системы, характеристическое уравнение которой

Решение:
Для ответа на поставленный вопрос воспользуемся билинейным преобразованием, т.е. сделаем подстановку в характеристическое уравнение (8.11)
Тогда получим характеристическое уравнение от 

Используя критерий Гурвица на основании линейной ТАУ для системы третьего порядка необходимым и достаточным условием устойчивости является произведение средних членов характеристического уравнения должно быть больше произведения крайних, т.е. 1113 — 511 = 88>0. Таким образом импульсная система устойчива.
Контрольная работа №17.
Написать разностное уравнение, связывающее выходную координату  и входное воздействие
и входное воздействие  импульсной системы, передаточная функция которой
импульсной системы, передаточная функция которой
Решение:
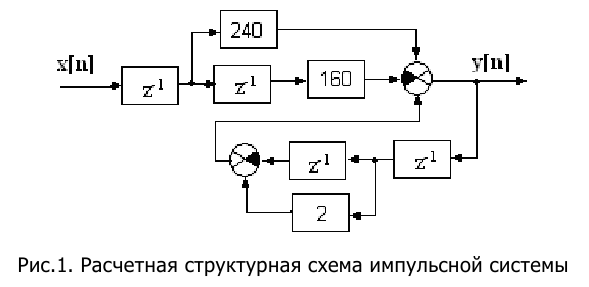
В соответствии с дискретной передаточной функцией первоначально надо составить структурную схему в виде одной из форм рис.1. Представим заданную  в форме 1
в форме 1

Домножим числитель и знаменатель  на
на  . В результате получим
. В результате получим
Разностное уравнение имеет вид:

Тогда выходная переменная может быть получена, как (при нулевых начальных условиях)


В соответствии с последним уравнением расчетная структурная схема представлена на рис.8.14
Контрольная работа №18.
Определить скоростную ошибку регулирования импульсной системы при подаче на вход управляющего воздействия  если ее разомкнутая передаточная функция
если ее разомкнутая передаточная функция
Период квантования  .
.
Решение:
В соответствии с формулой (8.22) и таблицей — преобразований для линейно нарастающего сигнала, получим
Этот результат вполне закономерен, так как система обладает астатизмом второго порядка.
Контрольная работа №19.
Пусть передаточная функция разомкнутой системы  . На САУ подается полезный сигнал
. На САУ подается полезный сигнал  и помеха «белый шум» со спектральной плотностью
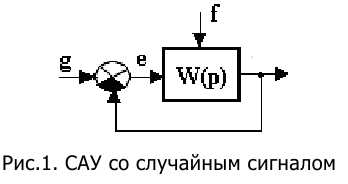
и помеха «белый шум» со спектральной плотностью  . Определить систематическую ошибку
. Определить систематическую ошибку  и среднеквадратическую ошибку
и среднеквадратическую ошибку  . Структурная схема представлена на рис.1.
. Структурная схема представлена на рис.1.
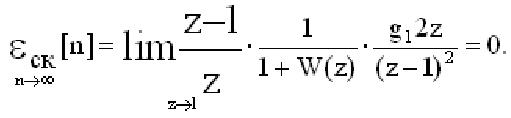
Систематическая ошибка определяется с применением коэффициентов ошибок
Тогда

Дисперсия ошибки по формуле (9.20)

Для системы второго порядка величина интеграла  вычисляется по формуле [2,19]
вычисляется по формуле [2,19]


Очевидно

или
Из полученных результатов следует, что увеличение общего коэффициента передачи разомкнутой цепи системы к с одной стороны ведет  уменьшению установившегося значения систематической ошибки системы
уменьшению установившегося значения систематической ошибки системы  . В тоже время, для уменьшения дисперсии ошибки, вызванной помехой на входе, необходимо, чтобы значение общего коэффициента передачи разомкнутой цепи системы к было минимально.
. В тоже время, для уменьшения дисперсии ошибки, вызванной помехой на входе, необходимо, чтобы значение общего коэффициента передачи разомкнутой цепи системы к было минимально.
Контрольная работа №20.
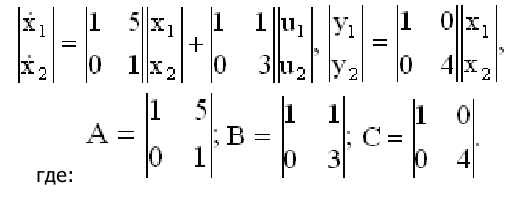
Оценить свойства управляемости и наблюдаемости САУ, заданной уравнениями состояния
Решение:
Находим матрицу управляемости
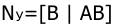
Так как ранг  , то система полностью управляема. Находим матрицу наблюдаемости
, то система полностью управляема. Находим матрицу наблюдаемости

Так как ранг , то САУ полностью наблюдаема.
Контрольная работа №21.
Определить управляемость САУ третьего порядка  с одним управляющим воздействием
с одним управляющим воздействием  , представленных уравнениями состояния
, представленных уравнениями состояния  с матрицами системы
с матрицами системы  и
и  вида
вида
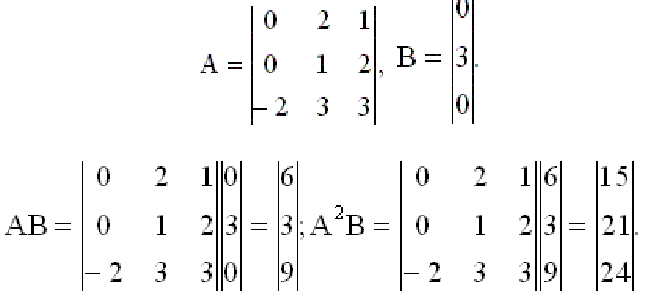
Решение:
Тогда матрица управляемости
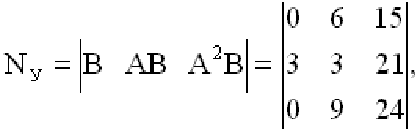

т.е. система управляема.
Эти лекции по ТАУ вам пригодятся:
- Примеры решения задач по теории автоматического управления
- Решение задач по ТАУ
- Примеры решения задач по ТАУ
- Курсовая работа по теории автоматического управления
