
Оглавление:


Колебания системы с одной степенью свободы
- Механическая система с одной степенью свободы имеет одну обобщенную координату q, и ее движение описывается одним уравнением Лагранжа ди дк дк (1). Обобщенная сила Q может рассматриваться как состоящая из трех частей: Q = Qn + Q ‘+ QB, где Qn — обобщенная сила потенциальных сил. Потенциальная энергия в общем случае зависит от координат точки системы, поэтому она зависит от обобщенной координаты q и обобщается по формуле Qn = —dP / dq Оно не зависит от скорости q.
В случае нестационарного силового поля и нестационарного силового поля потенциальная энергия явно зависит от времени. 0F включает в себя обобщенную часть силы, которая является результатом действия сопротивления. Сила сопротивления зависит как от числового значения, так и от направления скорости системной точки. Далее рассматривается случай линейного сопротивления, когда сопротивление системных точек пропорционально скорости этих точек и направлено в противоположном направлении. Часть обобщенной силы QB является производной от так называемых вынужденных или возмущающих сил, которые в основном зависят от времени.
Поступательная часть перемещения тела зависит от выбора точки, вместе с которой перемещается тело, а вращательная часть перемещения вокруг оси или вокруг точки не зависит от выбора точки. Людмила Фирмаль
Далее рассмотрим случай гармонических возмущений, где Q изменяется во времени в соответствии с законом синуса. В общем случае зависимость QB от времени может быть расширена с помощью ряда Фурье для учета дифференциальных уравнений движения для каждого синусоидального члена. Естественная линейная вибрация системы Под действием нескольких потенциальных сил, то есть b = -dlJ / dq, рассмотрим небольшую вибрацию системы с одной степенью свободы. Сопротивление и возмущение Там нет власти. Такая вибрация называется внутренней или свободной.
Когда система движется, обобщенные координаты, скорость и ускорение достаточно малы, чтобы игнорировать все члены q, q и q, которые являются квадратичными или более высокими в терминах уравнения Лагранжа (1), то есть, члены, которые включают эти квадраты Если система имеет малую вибрацию, то для обобщенной координаты q получается линейное дифференциальное уравнение. Колебания, в которых дифференциальное уравнение является линейным, называются линейными. Небольшие колебания линейны. Однако линейность не обязательно является небольшой вибрацией.
В общем, ограничения, которые должны быть наложены на величину, характеризующую движение, чтобы вибрация была уменьшена, могут быть установлены только после того, как проблема будет полностью решена в предположении, что вибрация мала. Далее рассматриваются только небольшие колебания или, если не маленькие, линейные колебания. Дифференциальное уравнение для естественной линейной вибрации системы. Чтобы вывести линейное уравнение малых собственных колебаний из уравнения Лагранжа (1), кинетическая и потенциальная энергии должны быть последовательно растянуты вблизи положения равновесия системы с q = 0.
Рассмотрим систему, в которой голономная, идеальная, неосвобожденная и фиксированная связь состоит из N точек и движется около положения равновесия. Ее кинетическая энергия При сделанных предположениях о совместной стационарности радиус-вектор r * каждой точки в системе зависит от времени только через обобщенную координату q. Следовательно, rk = — ^ q. Подстановка этого gk в уравнение кинетической энергии дает r = 72l ^ 2. Как и в случае с gk, величина A может зависеть только от q, а не от q. Когда A (q) расширяется вблизи q = 0 степенного ряда, Далее индекс 0 означает, что соответствующее значение вычисляется с q = 0.
Чтобы получить кинетическую энергию в терминах квадратичного и более низкого членов для q и q, достаточно получить только постоянное значение Ao из разложения A (. Где q0 и q0 — начальные значения обобщенных координат и обобщенной скорости. Используйте выражения q и q с r = 0, чтобы получить Ci = <70; C2 = qolk. Подставляя эти значения в (7), г =? 0cosft / + ^ sinft7. (8) Уравнение (8) является одной из двух основных форм естественной вибрации. Для изменения массы, x = x0 cos kt + j sin kt. Где х0 и т? 0 — начальное отклонение и начальная скорость точки от положения равновесия. Выразите выражение q в другом так называемом формате амплитуды. q = грех (ftz + a) = ^ sin cos cost + I cos sin kt.
Получить выражение из сравнения этого выражения с новой константой (7) Ct = / Isina; C2 = ^ cosa. Отсюда A-y / Cj + Cj; sina = C1M; cosa = C2 / A (9) Иногда рассчитывается tga = Cl / C2. Подстановка выражения для начального значения в (9) вместо Ct и C2 дает следующее: Значение А считается положительным и называется амплитудой вибрации. Определить максимальное отклонение обобщенных координат от положения равновесия, соответствующего q = 0. Обобщенная координата q изменяется от + A до -A. Безразмерная постоянная а называется начальной фазой вибрации. Это значение фазы колебаний (кт-а) при / = 0.
Начальная фаза может варьироваться от 0 до 2н. Чтобы определить начальную стадию a из начальных условий, вы можете использовать любую комбинацию двух тригонометрических функций (10), таких как sin a и cosa. Для тригонометрической функции, такой как tga, вы получаете два различных значения для a. Линейная вибрация в амплитудном формате, которая учитывает начальные условия, может быть выражена в конечном формате. ^ y ^ n ^ + ags ^). X = ^ Xo-t-p sin (kt + arctg ~ Движение системы, определяемое формулой (8) или ее эквивалентной амплитудой (11), называется гармонической вибрацией. Гармоническая вибрация — это вибрация, в которой обобщенные координаты меняются со временем в соответствии с законом синуса или косинуса.
- Вы можете перейти к косинусу, изменив фазу на n / 2 от синуса. Естественная линейная вибрация системы с одной степенью свободы является гармоникой. Массовые точки под воздействием линейной восстанавливающей силы также совершают гармонические колебания. Обобщенная координата q изменяется в соответствии с законом синуса. Закон синуса является периодической функцией с аргументом минимального периода 2l. Следовательно, q — периодическая функция. Значение периода колебаний m переменной t можно получить из условия, что добавление периода к этой переменной изменит фазу колебаний на минимальный период синусоиды 2n.
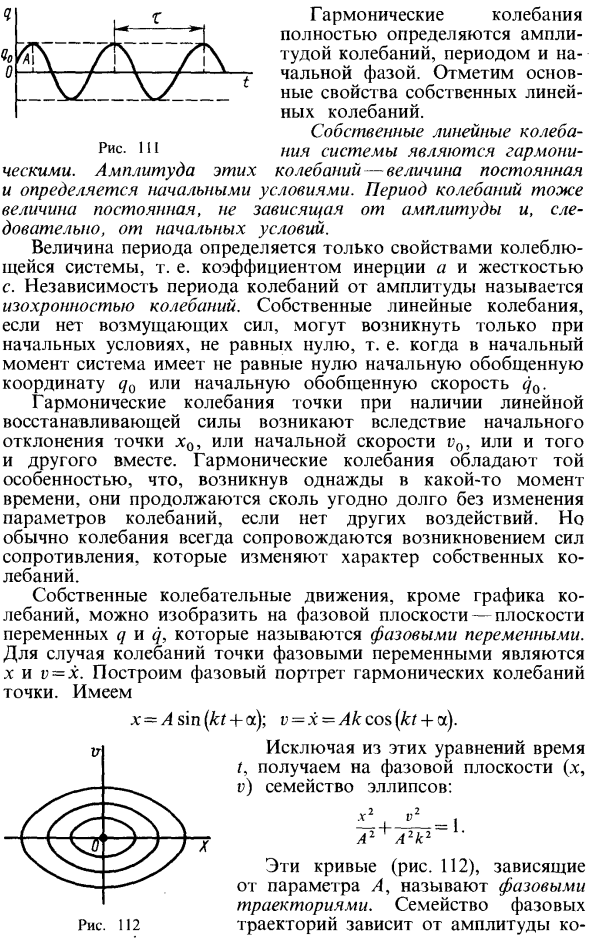
У нас есть L (f + m) + a = L / + a + 2l; m = 2l / A = 2l ^ / a / s (12) Для линейной точечной вибрации период равен m = 2lx / w / s0. Период вибрации выражается в единицах времени, например, в секундах. Обратная величина периода v = 1 / t называется частотой колебаний. Частота вибрации обычно определяется количеством вибраций в секунду или герц (Гц). Частота 1 Гц соответствует одной вибрации в секунду. Круговая частота k выражается периодом вибрации и следующей формой частоты. A = 2l / t = 2lu. (13) Из (13) видно, что круговая частота k — это частота времени, равная 2 л с. Рисунок 111 представляет собой график гармонических колебаний системы с одной степенью свободы. Это синусоида. Гармоническая вибрация полностью определяется амплитудой, периодом и начальной фазой вибрации.
Для рассмотрения малых колебаний системы в окрестности устойчивого положения равновесия необходимо получить разложения в ряды кинетической и потенциальной энергий и диссипативной функции. Людмила Фирмаль
Обратите внимание на основные характеристики естественной линейной вибрации. Рисунок 111 Амплитуда этих собственных линейных колебаний системы является гармонической величиной постоянной вибрации И определяется начальными условиями. Период колебаний также является постоянным значением и не зависит от амплитуды и, следовательно, начальных условий. Величина периода является характеристикой системы вибрации, т.е. Он определяется только коэффициентом инерции а и жесткостью с. Независимость периода вибрации от амплитуды называется виброизохронизмом. Уникальная линейная вибрация.
При отсутствии возмущающих сил они могут возникать только при начальных условиях, которые не равны нулю. То есть в первый момент система имеет ненулевую начальную обобщенную координату q0 или начальную обобщенную скорость q0. Гармоническое колебание точки при наличии линейной восстанавливающей силы вызвано начальным отклонением точки x0, начальной скоростью a0 или обоими. Гармоническая вибрация имеет характеристику, заключающуюся в том, что, как только она возникает в определенной точке, она продолжается до тех пор, пока не произойдет изменение параметров вибрации, если не будет другого влияния.
Однако обычно вибрация всегда сопровождает сопротивление, и природа естественной вибрации меняется. В дополнение к графику колебаний его колебательное движение может быть представлено на фазовой плоскости — плоскости переменных q и q, называемых фазовыми переменными. Для точечных колебаний фазовыми переменными являются x и v = x. Давайте создадим фазовый портрет гармонической вибрации точки. У нас есть x — грех (£ f + a); v = x = Akcos (kt + v). Рисунок 112 Удалите время t из этих уравнений, чтобы получить эллиптическое семейство в фазовой плоскости (x, p). Эти кривые (рис. 112), в зависимости от параметра A, называются фазовыми траекториями.
Семейство фазовых траекторий зависит от следующих амплитуд: Вариация определяется начальными условиями. Каждая фазовая траектория соответствует паре начальных значений x0 и v0. Точка равновесия на фазовой плоскости соответствует началу координат x = 0, a = 0. Когда точка массы гармонично колеблется, ее координата x и скорость v изменяются со временем. В результате каждый момент на фазовой плоскости соответствует определенной позиции точки изображения с координатами x и V. В течение одного полного гармонического колебания (периода) точка изображения представляет эллипс на фазовой плоскости. Отметим, что замкнутые фазовые траектории соответствуют периодическим колебаниям на фазовой плоскости и наоборот.
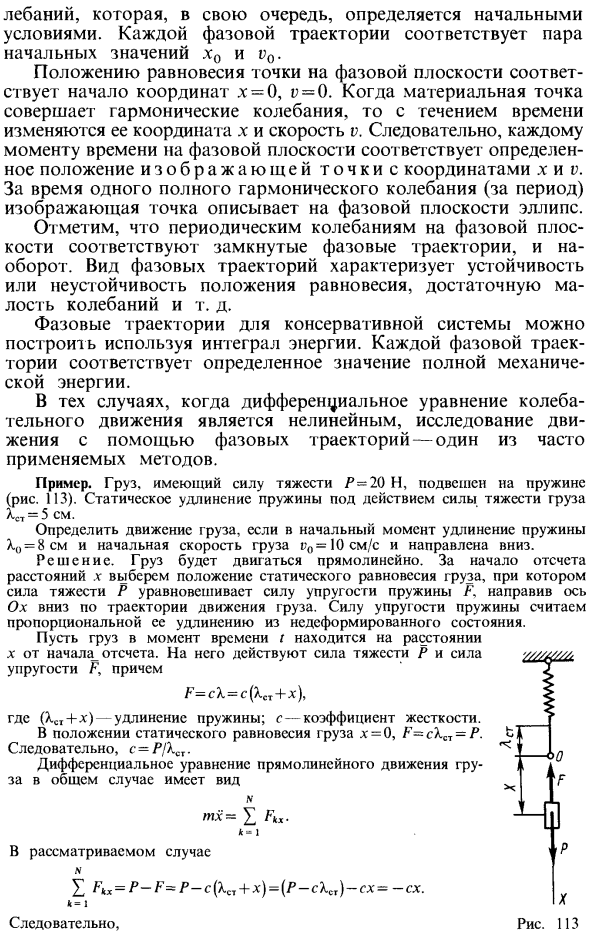
Тип фазовой траектории характеризует устойчивость или неустойчивость положения равновесия и малость вибрации. Консервативные системные фазовые траектории могут быть построены с использованием интеграции энергии. Каждая фазовая траектория соответствует определенному значению полной механической энергии. Если дифференциальное уравнение для колебательного движения является нелинейным, изучение движения с использованием фазовых траекторий является одним из наиболее часто используемых методов. mx = —cx \ x + fc2x = 0; k = ^ / s! т. Если вы не выберете место статического равновесия в контрольной точке, уравнение будет иметь постоянную правую часть. Другими словами, это становится неравномерным.
Решение дифференциального уравнения может быть выражено в следующем виде: x = C1cos * / + C2sin * (; ”= x = −C, * -sinfc (+ C2 * cosb. Константы C и C2 определяются начальными условиями. Время 1 = 0, начальная скорость x = b0 = 10 см / с; х = х0 = х0-х „= 8-5 = 3 см; k = y / eim = y / glkcl = y / 99OI5 = 14 с «’ Константа С ‘! И с2. Если выражение для x и x равно 1 = 0, значение равно C | = xo = 3cm. C2 = »o / * = 0,71 см Уравнение движения груза принимает вид x = 3cos 141 + 0,71 sin 141 см Используйте формат амплитуды. амплитудное 4 = х / с? + C? =, / 9 + 0,50 х 3,08 см.
Начальная фаза а. sin a = C, l = 0,97> 0; cos a = C2 / A = 0,71 / A> 0. Следовательно, угол a находится в первой четверти и, в зависимости от значения (например, sina), a = 1,34 = 0,43 л. Уравнение движения для нагрузки в амплитудной форме имеет вид , <= 3,08 см (14 (+ 0,43 rt) см). Период собственной вибрации нагрузки составляет m = 2n / * = 0,45 с.
Смотрите также:
Задачи по теоретической механике
