
Оглавление:



Кинематика и условия подбора чисел зубьев планетарных передач
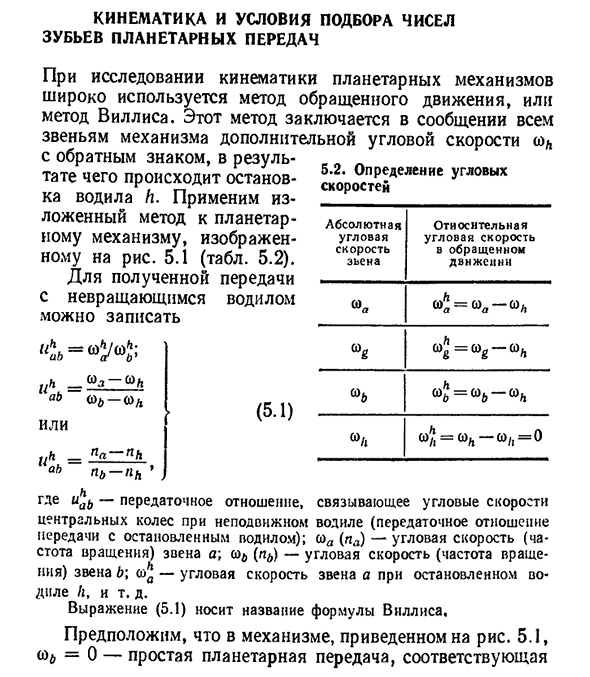
- Условия выбора кинематики и числительных Зубья планетарной передачи При изучении кинематики планетарных механизмов широко используется метод обратного движения, или метод Виллиса. Данный способ заключается в сообщении всем звеньям механизма дополнительной угловой скорости с обратным знаком, в результате чего происходит остановка водителя Н. 5.1 (табл. 5.2). Невращающееся применение 5.2 определение угловой скорости Абсолютная угловая
скорость звена Относительная угловая скорость обратного движения COg=COg-C0ft «Л»» Передача водителем = l ab (l1) ,, ft-a h ab — ©l или iA= ад -» ft — » ft» (5.1) Кстати—передаточное число редуктора, соединяющего угловой скорости центрального колеса при остановленном водиле (передаточное отношение передачи перевозчик остановился); 0) и (ПА)—ссылка а угловая скорость (скорость);>б (я) — угловая скорость передачи (передаточное отношение передачи перевозчик остановился); > б (я) — угловая скорость Формула (5.1) называется формулой джипа,
И чтобы. 5.1, (o = 0-простая планетарная передача, соответствующая 155вариант1 (см. Людмила Фирмаль
табл. 5.1): Где IDL-передаточное отношение нового колеса B. Колесо от А до водителя Н на ост- фут • Ах. = = 1-Uft • AB. Один. 1-у h * ab Пример 5.1. L^A в передаче (см. табл.. 5.1, Вариант 1) имеем g*=100, z3=20. La определяет, если uball и nft=1800 мин-1. Nb=0ubah=\ — u hab=l-(r-Gy/ha); U » BA h-ha+g * _2 0-f-1 0 0_fi—— £ ~» ~ 2 0 —— B’ l y=l AI y a=l a/m*y= 1 8 0 ()/ 6 = 3 0 0 m и n~1- Рассмотрим кинематическую зависимость в передаче, выполненной по схеме, для которой она была выполнена. Мы определяем,используя формулу Виллиса, передаточное
отношение для передаточного отношения и в неподвижном звене B соединяем угловые скорости звеньев a и e.: 1 — и АВ 1-у ft * eft (5.2) л Аналогичным образом мы найдем ie_ab 1-и ч ба 1-у фут ea Если вы приблизите значение Ubb (ube, ua) к единице, передаточное отношение u^(u aft,I^) будет бесконечно большим. Пример 5.2. Определим передаточное отношение и планетарное передаточное отношение (см. табл.. 5.1, вариант 6, в остановленном звене Б), частота вращения драйвера и спутника на драйвере в следующих
- исходных данных: GA-18; g=90; g? =36; G/=33; GE=87; PA=1440 мин-1. Когда колесо неподвижно B-передаточное отношение 156 частота вращения водителя определяется из условий Так как PI=0, nft=na / uaft=240min-1. Драйвер (ng-nb)=(rif-n)=(ng-nh) l (n a-nh)=ua——ZG = — zfl/zg = — l/2;(ng — N h)=-(La-nft)/2= — 600 мин-1. Условия отбора количества зубов для миграции планеты. Выбор количества зубьев зубчатой передачи в планетарной передаче мега-сателлитов должен отвечать следующим трем условиям: Условия выравнивания для различных вариантов передачи (см. таблицу). 5.1):А. З+2zg=ЗБ;Б. з — ± — ЗГ=ЗБ-ЗФ’, С
. ЗБ-ЗГ=Зе-ЗФ’,(5.3)3к.з+2zg=зд;Здж ЗГ-ЗФ. Для обеспечения зазора между спутниками необходимо сказать, что сумма радиусов окружностей проекции соседних спутников (da) g должна быть меньше расстояния между осями I (в условиях окрестности 5.1), т. е. (4) g1 существуют дополнительные условия, ограничивающие выбор количества планетарных зубьев в зависимости от количества сателлитов. Это дополнительное условие называется условием сборки и выражается целым числом (g a+zb)/nw=y, (5.5) 157 т. е. сумма числа зубьев на центральном колесе должна быть кратна nw. В примере мы рассмотрим, как используются условия, перечисленные в подборе количества зубов планетарных миграций.
Пример 5.3. Определите количество зубьев на колесе для передачи A B a(см. Людмила Фирмаль
таблицу. 5.1) следующие данные: ubah-4; nw-3 и 18z » =[уравнение (5.3)], из условия сборки ha4z=n w y[уравнение(5.5)] и передаточного отношения u bh=1 4Gy/ha можно получить уравнение для определения числа зубьев.: Nw принимая Zx-21 из условий наличия»подреза» и » кратности» Или za: z»:Gy: u= 2 1 :2 1 : 6 3 :2 8 , где za=2 1;zg=21; zb=63;■y=2 8. 2. Определить выполнение условий выравнивания za+z g=zb-z g; 2 1 4 — 2 1 = 6 3 — 2 1 ; 42 = 42. Таким образом, условие выравнивания выполняется. 3. Определить выполнение условий сборки 2a+zb=y n w; 21 4-63 = 28 — 3; 8 4 = 8 4 . Таким образом, условие сборки выполняется. 4. Мы подтверждаем выполнение соседних условий(5.4) (d a) g(da)g; (G4 4-g,)sin(l/n J>(z^f-2)));( ); грех (L / ID,,) 0.866 Таким образом, условия окрестности удовлетворяются. Количество зубьев на планетарном зубчатом колесе определяется правильно.
Смотрите также:
