
Оглавление:



Кинематические уравнения Эйлера
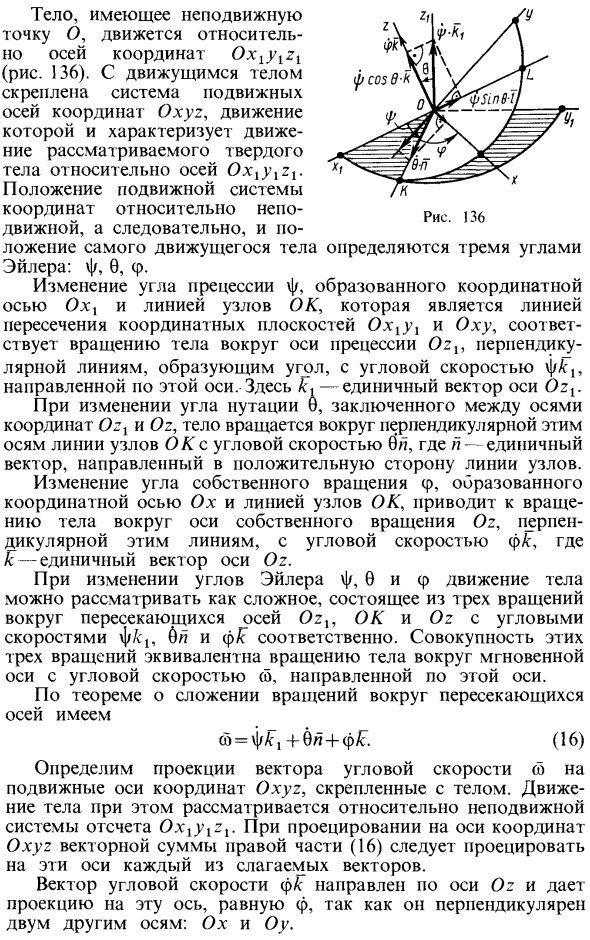
- Установить зависимость проекции вектора угловой скорости на неподвижные оси на теле, углы Эйлера , 0, p и их производные по времени. Определяется тремя углами Объект с фиксированной точкой O движется относительно координатной оси Ox1yizi (рис. 136). Система движущихся осей Oxyz прикреплена к движущемуся телу, и ее движение характеризует движение рассматриваемого тела относительно оси Oxlylzl.
Положение движущейся системы координат относительно неподвижной системы координат и, следовательно, положение самого движущегося тела Эйлера: , 0, p Изменение угла прецессии относительно оси Ox и линии узла, являющегося пересечением координатной плоскости и Ohu соответственно ОК Это означает, что угловая скорость fG направлена вдоль этой оси, а тело вращается вокруг оси прецессии Oz, перпендикулярной линии, образующей угол.
Нахождение фигуры равновесия нити на поверхности в случае, когда существует силовая функция, также приводится к определению максимума или минимума некоторого определенного интеграла. Людмила Фирмаль
Когда угол сочленения 0 между осями координат Oz и Oz изменяется, тело вращается вокруг линии узлов OK, перпендикулярных этим осям, с угловой скоростью b. d единичный вектор, направленный на положительную сторону линии узла. Если соответствующий угол поворота , образованный осью координат Ox и узловой линией OK, изменяется, объект, угловая скорость которого pk и 1c является единичным вектором оси Oz, центрируется на соответствующей оси Oz вращения, перпендикулярной этим линиям. Вращение происходит.
При изменении углов Эйлера , 0 и движение тела можно рассматривать как комплекс, состоящий из трех поворотов вокруг пересекающихся осей Oz OK и Oz угловых скоростей bj и e соответственно. Комбинация этих трех вращений соответствует вращению тела вокруг мгновенной оси с угловой скоростью d, направленной вдоль этой оси. По теореме о сложении вращения вокруг пересекающихся осей d = ^ 1 + 0 + + (16) Определяет проекцию вектора угловой скорости th на подвижную координатную ось Oxyz, прикрепленную к телу.
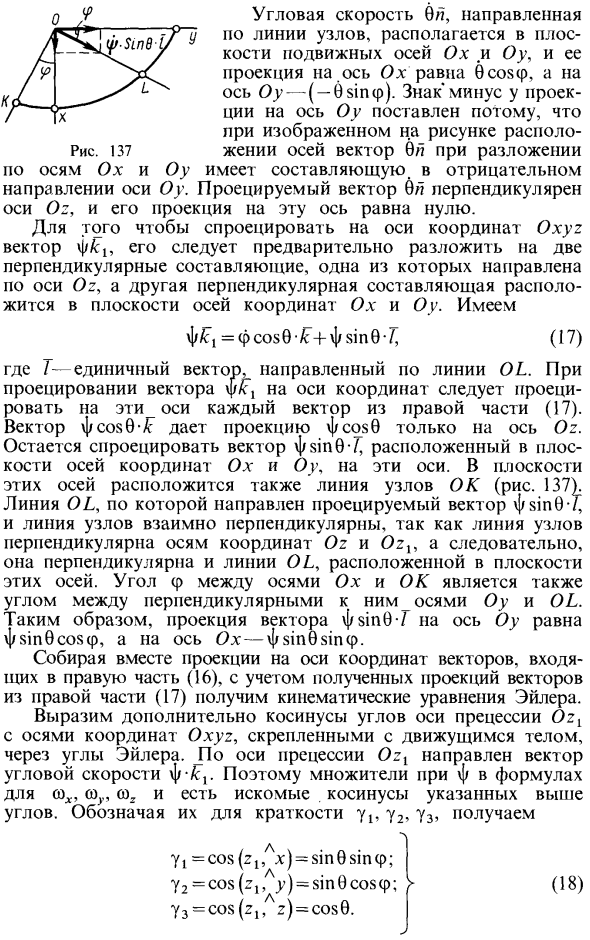
- Движение тела рассматривается относительно фиксированной системы отсчета Ox, y, z. При проецировании векторной суммы справа от (16) на оси Oxyz каждый член вектора должен проецироваться на эти оси. Вектор угловой скорости c 1c ориентирован вдоль оси Oz и перпендикулярен двум другим осям Ox и Oy, что дает этой оси проекцию, равную p. Рис. 137 Ох и ах на оси Угловая скорость 0i, направленная вдоль линии узла, находится в плоскости осей переноса Ox и Oy, проекция на ось Ox равна 0cos p, а проекция на ось Oy ( 0sin p).
Знак минус для проекции на ось Oy установлен потому, что расположение оси, показанное на рисунке, имеет отрицательный компонент, когда вектор 0p разложен. Направление оси Oy. Вектор проекции 0 перпендикулярен оси Oz, а проекция на эту ось равна нулю. Чтобы спроецировать вектор фА , Сначала его нужно разложить на две вертикальные составляющие на координатной оси Oxyz. Один ориентирован вдоль оси Oz, а другой в плоскости вертикальных осей Ox и Oy. У нас есть = pcos0 + sin0 (17) Где T единичный вектор в направлении вдоль линии OL. При проецировании вектора fG каждый вектор с правой стороны (17) должен проецироваться на эти оси на осях координат. Вектор fso0 k дает проекцию x cos0 только на ось Oz.
Наоборот, по закону равенства действия и противодействия, рука будет испытывать со стороны точки давление, направленное вниз и равное абсолютному весу по интенсивности и направлению. Людмила Фирмаль
Осталось спроецировать вектор 0 нахождения в плоскости координатных осей Ox и Oy. На этих осях. Поскольку линии узла перпендикулярны координатным осям Oz и Ozt и, таким образом, также перпендикулярны линиям, линия узла OK также располагается в плоскости этих осей (рис. 1371, линия OL, на которую направлен вектор проекции sin0 T, и Линии узлов перпендикулярны друг другу), поскольку угол p между осями OL Ox и OK, расположенными в плоскости этих осей, представляет собой угол между осями Oy и OL, перпендикулярными им Проекция вектора fwO Г на Oy равна i sin0cos p, а ось Oh— isin0sin p.
Рассматривая проекцию вектора, полученную из правой части (17), объединяя проекции на оси координат векторов, содержащихся в правой части (16), получается уравнение движения Эйлера. Косинус угла оси прецессии Ozt выражается с помощью координатной оси Oxyz, прикрепленной к движущемуся телу через угол Эйлера. Вектор угловой скорости направлен вдоль оси прецессии Ozt. Следовательно, коэффициент в уравнении Сожа является вычисленным косинусом вышеуказанного угла. Покажите их для краткости, 2, 3, y = cos (z ,, Ax) = sin0sin p; Y2 = cos (z1 ,, p) = sin0cos p; (18) y3 = cos (z, Az) = cos0.
Смотрите также:
Задачи по теоретической механике
| Кинетическая энергия тела с одной закрепленной точкой | Задача о вращении твердого тела вокруг неподвижной точки. Случаи интегрируемости |
| Динамические уравнения Эйлера | Астатический гироскоп |
