
Оглавление:


Кинематически возможные состояния.
- Киноматически возможное состояние. Это означает, что степень свободы пластической деформации, связанная с переходом[166], находится в кинематически способном состоянии 361 Чем мы стали 4Л-*—- — Г» -» -? На£! Восемь. Рис 246 ответ от положительной работы- Отдельные элементы пластического состояния должны быть
способны реализовываться на практике. Обратившись к первому примеру, описанному в предыдущем абзаце, заметим, что состояние соответствует внутренней части заштрихованной области на рисунке. 244, отвечает требованию, чтобы система оставалась жесткой. Кривая а соответствует случаю, когда на пролете
образуется пластиковый шарнир. Этого недостаточно, чтобы позволить балке Людмила Фирмаль
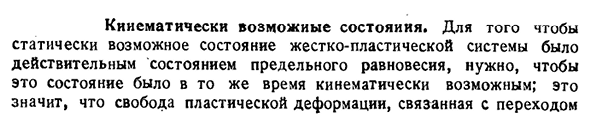
свободно деформироваться(см. рис. 246, а). Если рассматривать статически возможное состояние, удовлетворяющее условию (b), то пластический шарнир получается на промежуточной опоре, чего достаточно для изменения системы снова 246, b). Пластиковые петли пролет и рис. балка может быть преобразована, как показано на фиг. 244, только тогда, когда она доходит до средней опоры,
соответствующей точке а из 246, а; такое состояние кинематически возможно, более того, соединение со статическим состоянием. Последнее замечание означает, что » пластическая сила должна производить соответствующее смещение; грубо говоря, если напряжения в стержнях равны, она снимется,
- я не укорачиваю.«Вернемся к схеме формирования пластиковых шарниров, показанной на рисунке. 246, а, следует отметить, что это не исключает возможности деформации по схеме, показанной на рисунке. 246, А, но в то же время на левом шарнире относительное вращение имеет направление, противоположное моменту, и работа момента отрицательна, что приводит к кинематически рассматриваемому плану деформации. Второй способ определения точных или приближенных значений критических нагрузок жесткопластической системы учитывает различные кинематически
возможные схемы перехода системы в текучее состояние, а принятая кинематическая методика дает распределение скорости деформации, что позволяет рассчитать значения соответствующих сил совместно с условиями текучести. Если в каждом элементе достижение предельного состояния определяется величиной 362 теории предельного равновесия, то задача усилия решается достаточно просто. XV Усилие в одиночку. Поэтому в случае ферм предполагается, что при выборе кинематически возможного состояния можно свободно удлинить или укоротить несколько стержней.
Напряжение каждого стержня будет равно пределу текучести со знаком плюс или Людмила Фирмаль
минус соответственно. При изгибе балки, игнорируя влияние боковых сил на предельное состояние, необходимо учитывать пластическую часть момента, равную Mg. Зная плоскость нагружения и используя законы связанного течения, можно найти точку регулярной поверхности, если условия пластичности элементов содержат некоторые обобщенные силы. Рис, 247. Она имеет заданное направление. Координаты этой точки дают значение
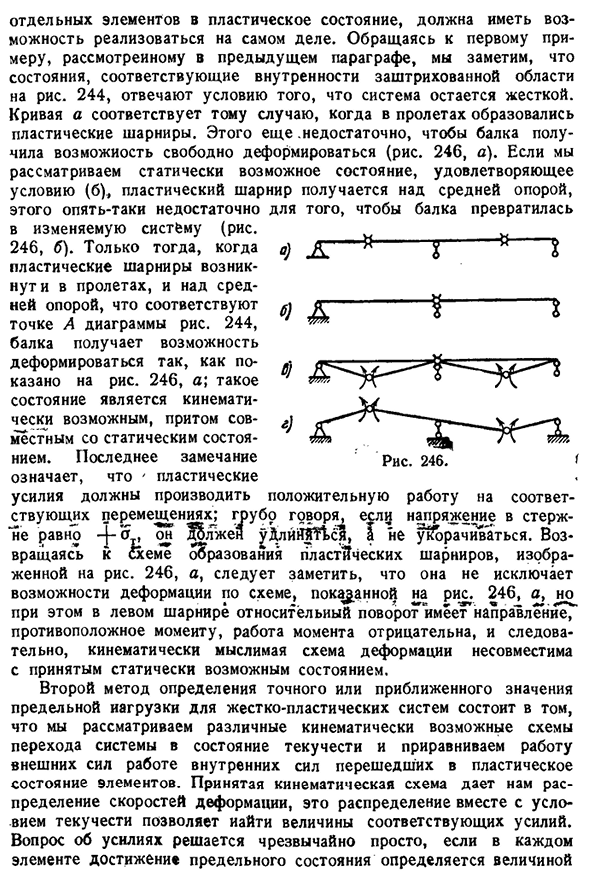
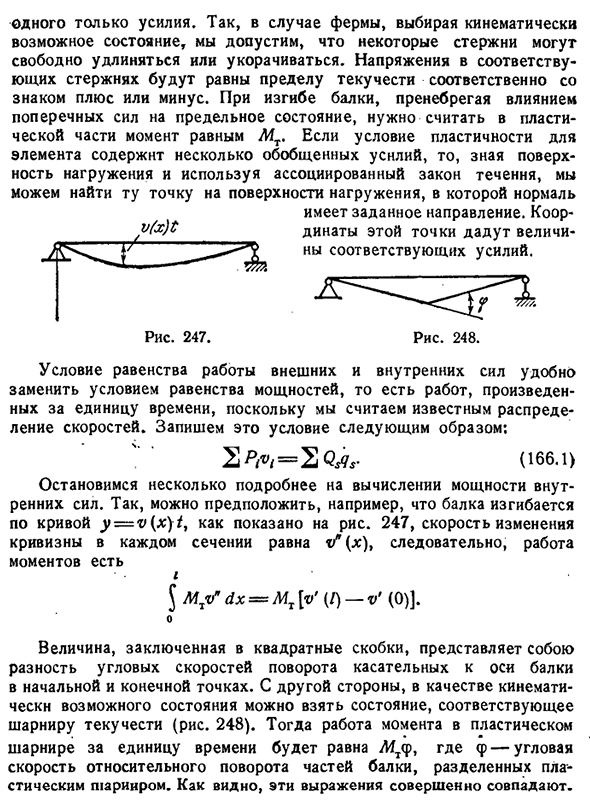
соответствующей силы. Рис, 248. Удобно заменить условия равенства работы внешних и внутренних сил условиями равенства возможностей. Запишите это условие следующим образом; 2^=2(166.1) Давайте еще немного поговорим о расчете силы внутренних сил. Так, например, можно предположить, что балка будет изгибаться вдоль кривой y-v (x) i. 247, скорость изменения кривизны каждого сечения равна I f (x), поэтому работа момента равна Я Дж м Дж Ф ДХ-афт\и Ф(я) — в’(0)]. Ноль. Значение, заключенное в квадратные скобки,
обозначает разность угловых скоростей вращения касательной к оси луча в начальной и конечной точках. С другой стороны, в качестве кинематически возможного состояния можно принять состояние, соответствующее шарниру ликвидности (фиг. 248). Тогда работа момента в пластиковом шарнире за единицу времени будет равна 2it<p.<p — это участок балки, разделенный пластиковым шарниром, эти уравнения в точности совпадают.
Смотрите также:
| Расчет на прочность при изгибе | Работа внутренних сил |
| Формула Эйлера для критической силы. | Явление усталости материалов |
