
Оглавление:


Исследование колебаний энергетическим методом. Определение собственной частоты
- Собственная частота системы является важным параметром, определяющим характер как свободной, так и вынужденной вибрации системы. Сложные системы, наряду с описанными выше методами, часто используют энергетический метод, определяющий собственную частоту системы used. Во многих случаях закон энергии легко и быстро достигает цели. В консервативной системе общая механическая энергия, равная сумме потенциальной и кинетической энергии, остается постоянной. Это закон сохранения механической энергии, когда система движется через поле потенциальных сил. Где T-кинетическая энергия, а P-потенциальная энергия системы.
Используя закон I в системе с 1 степенью свободы, вы можете пойти дальше двумя путями. 1 после вычисления производной по времени с обеих сторон уравнения 1 Найти дифференциальное уравнение движения системы, которое непосредственно определяет собственную частоту системы. 2 подсчитайте потенциальную энергию от положения равновесия системы. Далее следует закон сохранения механической энергии. Когда потенциальная энергия достигает своего максимума, Кинетика Когда кинетическая энергия максимизирована, она гаснет. Все наоборот true. So … Г ах Пт. х, 2 Каждая величина представляет собой сумму неизменной механической энергии. Движение точек принято считать гармоническими колебаниями.
Это обстоятельство значительно облегчает решение задач, так как внутренние силы системы большей частью бывают неизвестны. Людмила Фирмаль
Максимальная кинетическая энергия может быть представлена в следующем виде Максимальная потенциальная энергия Нм. указывает, что Х в. Затем, согласно 2 3 4 си Если потенциальную и кинетическую энергию всей системы суммировать из энергии отдельных частей, то формула 5 переводится следующим образом В этом случае этот метод называется методом Рэлея, который может быть обобщен на системы с распределенной массой.
Опционально, при соблюдении граничных условий, формой колебаний является функция, описывающая отклонение массы системы в момент, когда потенциальная энергия достигает своего максимума и предполагающая, что колебания всех точек системы происходят с одинаковой частотой и находятся в одной фазе. А С——— 7 Где f x — режим вибрации, и — жесткость балки при изгибе. Рэлей показал, что эта формула дает точное значение собственной частоты, если форма выбранной вибрации точно соответствует фактической форме. Рэлей, теория звука, т. 1 и 2, изд. 2, 1955, гостехиздат, Москва.
Однако в большинстве случаев фактический режим колебаний является неионным, и если выбрать форму, удовлетворяющую граничному условию, то формула 7 находит значение собственной частоты близким к истинному value. As Рейли показал, что это значение всегда больше истинного значения. При решении проблемы первым способом рекомендуется выполнить следующие действия 1 Создайте выражение кинетической энергии и энергии положения в любом положении системы. 2 Найти дифференциальное уравнение движения системы путем вычисления производной по времени от полной механической энергии системы. 3.Определить собственную частоту системы, используя коэффициенты дифференциальных уравнений движения.
Найти уравнение движения путем интегрирования дифференциальных уравнений уравнений движения и определения любой постоянной из исходных данных. Если вы хотите решить проблему 2-м способом, то вам необходимо применить следующую последовательность действий 1 Спросите себя о форме вибрации. Это, вероятно, близко к реальным колебаниям, которые в любом случае будут удовлетворять граничным условиям задачи. 2 вычислить максимальную кинетическую энергию и максимальную потенциальную энергию. 3 приравняйте их друг к другу и вы найдете квадрат собственной частоты системы.
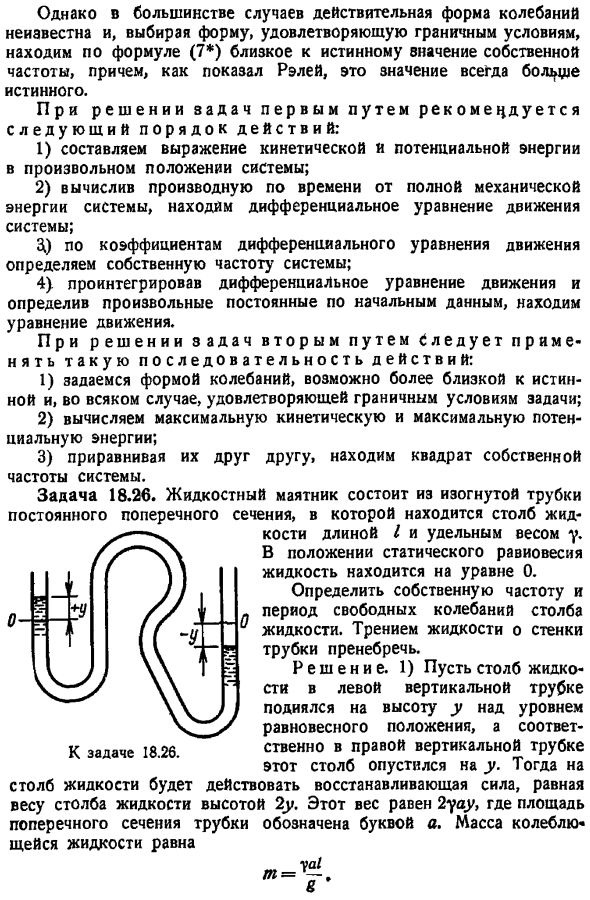
Задача 18.26. Жидкий маятник состоит из изогнутой трубки с определенным поперечным сечением, внутри которой находятся жидкие столбы Длина I, удельный вес y bone. At положение статического равновесия жидкости находится в уравнении 0. Одиннадцать- Определите собственную частоту и период свободной вибрации колонны. Трение жидкости о стенки трубки пренебречь. Решение. 1 поднять столб жидкости в левой вертикальной трубке на высоту y выше уровня равновесного положения и, соответственно, опустить этот столб в правой вертикальной трубке на y. и далее… ИППП Восстанавливающая сила столба жидкости равна массе столба жидкости 2u.
Эта масса равна 2uau, а площадь поперечного сечения трубки обозначается буквой A. масса вибрирующей жидкости Создайте дифференциальное уравнение для колебаний столба жидкости from P — 2wow. Знак минус указывает на то, что восстанавливающая сила всегда направлена в противоположном направлении от координаты Y. Если мы введем в это уравнение J y 0. Период вибрации отсюда и собственная частота равны. — 1 Таким образом, эквивалентная математическая длина маятника равна 2.Удельный вес и площадь поперечного сечения трубы не влияют на собственную частоту и период колебаний колонны. 2 та же проблема может быть решена с помощью энергетического метода первый метод.
Найти кинетическую энергию системы 7-1 Л — 1 — Л 2 Чтобы вычислить энергию положения, вспомним, что она равна силе работы поля при перемещении из заданного положения примерно до 0. Р — cydy — J2 в-исключением Йоды уау3. 3 Ага. Где c-квази-коэффициент жесткости, равный 2ua. Полная механическая энергия не делает change. As результат, y — — , Va e const- Если мы вычисляем производные по времени с обеих сторон уравнения, мы находим дифференциальное уравнение для движения жесткости Собственная частота и период вибрации равны. Соответствует результату 1. 3 Эта проблема может быть легко решена даже с помощью энергетического метода простой метод.
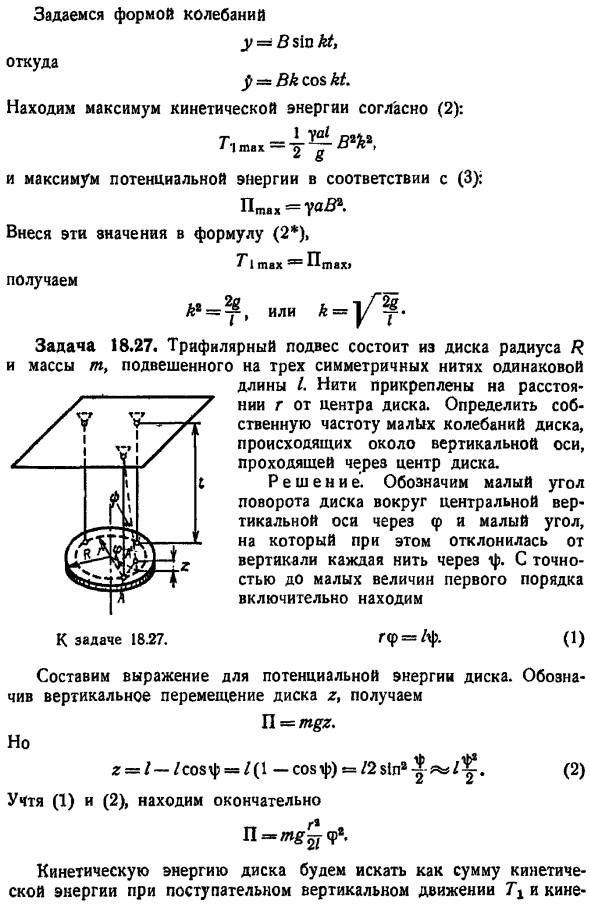
Установите форму вибрации Дж грехов КТ Откуда sBka СКТ. 2 искать максимальную кинетическую энергию согласно. И 3 в соответствии с максимальной потенциальной энергией золото ya5. Если ввести эти значения в Формулу 2 Мы получаем Задача 18.27.Трехфунтовая подвеска состоит из дисков радиусом R, подвешенных на 3 симметричных резьбах одинаковой длины I. резьба установлена на расстоянии r от центра диска. Определите собственную частоту малых колебаний диска, которые происходят вокруг вертикальной оси через центр диска. Решение. Малый угол поворота диска вокруг вертикальной оси его центра обозначается p, а малый угол каждой нити отклоняется от вертикальной оси на.
С точностью до небольшого первичного включительного значения р р ф. 1 Давайте выразим потенциальную энергию диска. Обозначим вертикальное смещение диска Z, А Н ГЗ. Но… з з — sozf 1-sovf 2stn2— г. 2 Рассмотрим 1 и 2 и, наконец, Ищите кинетическую энергию диска как сумму кинетической энергии поступательного движения Энергия при вращении диска вокруг центральной вертикальной оси. И затем… МВ т г г.-— Где, согласно 2 и 1 о ф г р. Узнайте ниже Р — г х ОА—г Р2. Если мы сравним 2 члена кинетической энергии системы, то увидим, что 7 — это небольшая величина 4-го порядка. Это можно игнорировать по сравнению с небольшим количеством 2-го порядка.
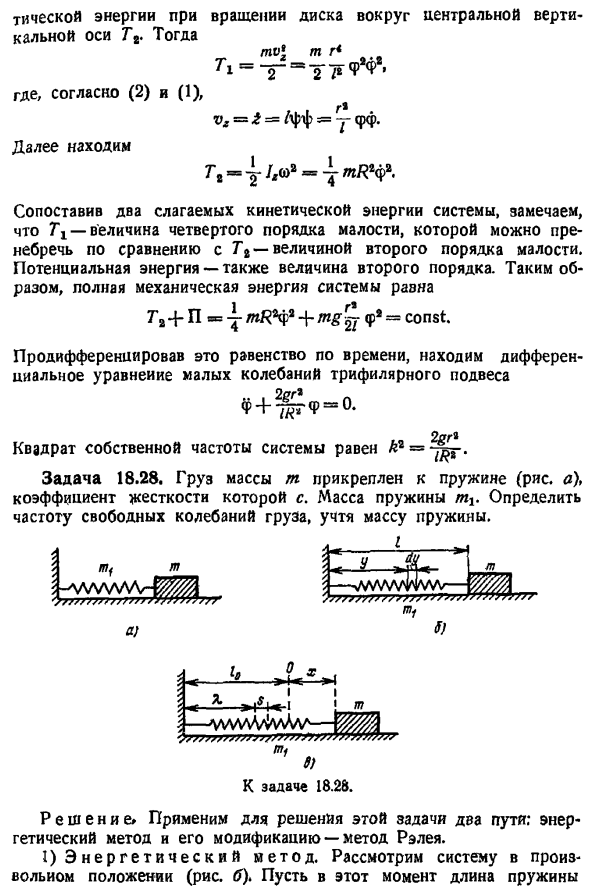
- Потенциальная энергия также является вторичной величиной. Таким образом, общая механическая энергия системы равна G, P Y wRV mgr- const. Если мы дифференцируем это уравнение по времени, мы находим дифференциальное уравнение для малых колебаний подвески трифилера. — Квадрат собственной частоты системы равен Задача 18.28.Нагрузка на массу m прикреплена к пружине рис. а, ее коэффициент жесткости равен c. масса пружины равна t .Определите частоту свободных колебаний груза с учетом массы пружины.
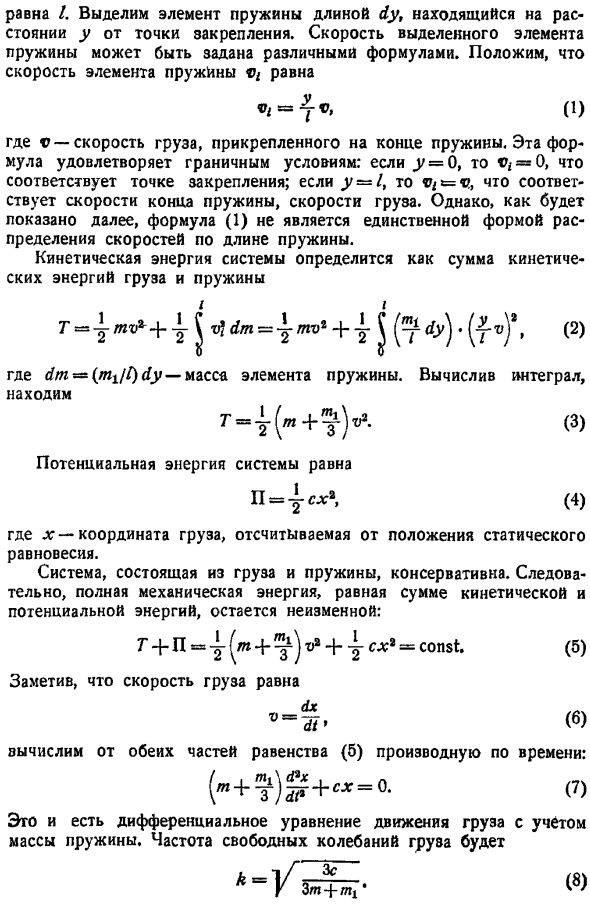
По вопросу 18.18. Solution. To для решения этой задачи могут быть применены 2 метода энергетический метод и его коррекция, метод Рэлея. 1 энергетический закон. Рассмотрим систему в любом положении рис. Б. в этот момент длина пружины Я и равный. Выберите пружинный элемент длины dy на расстоянии y от точки крепления. Скорость движения выделенных пружинных элементов может быть задана различными формулами. Скорость пружинного элемента Т. 1 Где с-скорость груза, прикрепленного к концу пружины. Эта формула удовлетворяет граничному условию если y 0, то c 0, соответствует неподвижной точке если y-1, B, то B f, соответствует скорости конца пружины, скорости груза.
Внутренние силы, которые отсутствуют в формулировке теоремы, непосредственно па движение центра инерции системы не влияют. Людмила Фирмаль
Однако, как показано ниже, 1 не является единственной формой распределения скорости по длине пружины. Кинетическая энергия системы определяется как сумма нагрузки и кинетической энергии пружины R ym −1- url на японском языке. НН — — лго 1. 2. , 2 Где rfw i dp-масса пружинного элемента. После вычисления интеграла 7-т т л Потенциальная энергия системы 4 где x-координата нагрузки, измеренная из положения статического равновесия. Система, состоящая из нагрузки и пружины, консервативна. Таким образом, общая механическая энергия, равная сумме кинетической энергии и потенциальной энергии, не изменяется. Т п г м ый О -я-ух пост.
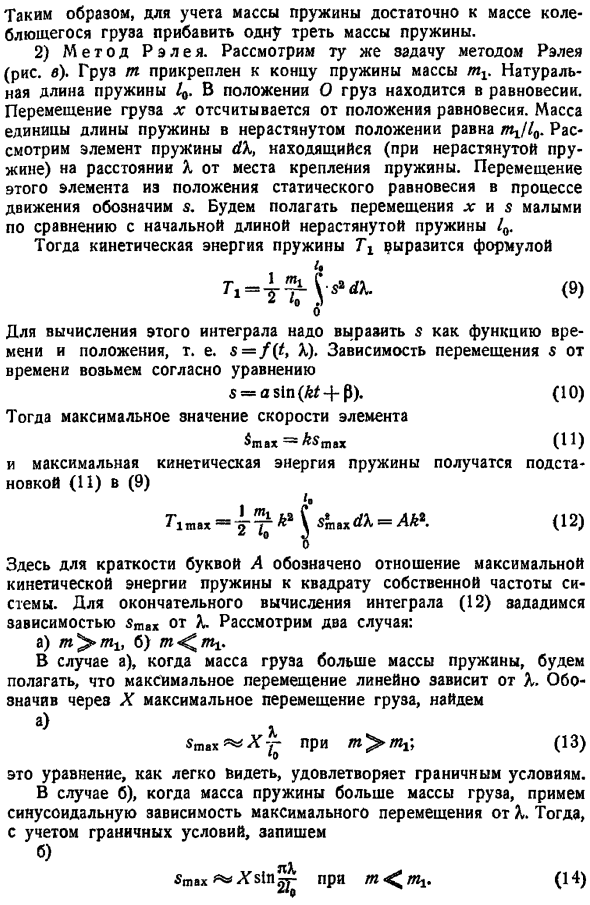
Скорость загрузки ДХ ДТ Вычислите производную по времени с обеих сторон уравнения 5 Эго-это дифференциальное уравнение для движения груза, которое учитывает массу пружины. Частота свободной вибрации груза равна 5 6 Поэтому, чтобы узнать массу пружины, достаточно добавить 3 минуты 1 массы пружины к массе вибрирующей нагрузки. 2 Закон Рэлея. Рассмотрим ту же проблему с методом Рэлея рисунок c .Нагрузка t прикреплена к концу массы пружины MV длина естественной пружины 4-Положение O, нагрузка находится в равновесии. Движение груза x отсчитывается от положения равновесия.
Масса единицы длины пружины в нерастянутом положении равна mjl .Рассмотрим пружинный элемент dX, который расположен на расстоянии от места установки пружины есть пружина, которая не растягивается. Движение этого элемента из положения статического равновесия в процессе движения обозначается e. будем считать, что перемещения x и s малы по сравнению с начальной длиной неразрывной пружины 0. Кинетическая энергия пружины 7 выражается формулой Чтобы вычислить этот Интеграл, должен быть выражен как функция времени и положения, то есть s f t, X .Временная зависимость смещения а получается по формуле ы Асин Ж П.
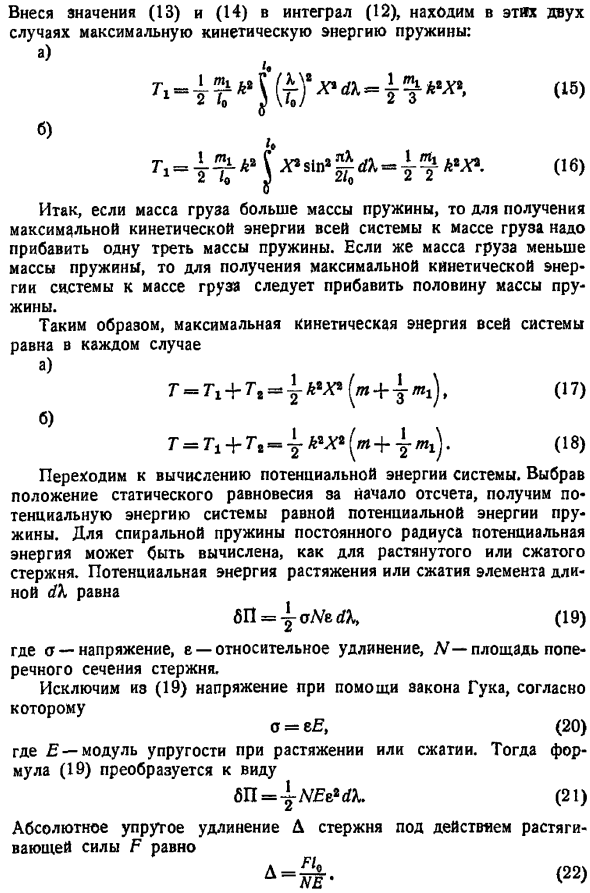
Тогда максимальное значение скорости элемента Техас 11 А максимальная кинетическая энергия пружины рассчитывается по следующему уравнению 9 12 Здесь для простоты буква А обозначает отношение максимальной кинетической энергии пружины к мощности 2 собственной частоты системы. Окончательный расчет интеграла 12 определяет зависимость sraax от X. рассмотрим 2 случая. а, Б от I1. в случае а, если масса груза больше массы пружины, мы предполагаем, что максимальное смещение линейно зависит от X. Где X представляет собой максимальное смещение груза один для m m , 13 Это выражение удовлетворяет граничному условию для удобства просмотра.
Случай Б принимает синусоидальную зависимость максимального смещения X, если масса пружины больше массы груза. Затем рассмотрим граничные условия б Если значения 13 и 14 ввести в Интеграл 12, то найдется максимальная кинетическая энергия пружины 2 из них 15 один б й-в грех дх г а а. 16 Именно поэтому, если масса груза больше массы пружины, то для получения максимальной кинетической энергии всей системы необходимо прибавить 3 минуты 1 массы пружины к массе груза. Если масса груза меньше массы пружины, то для получения максимальной кинетической энергии системы необходимо прибавить половину массы пружины к массе груза.
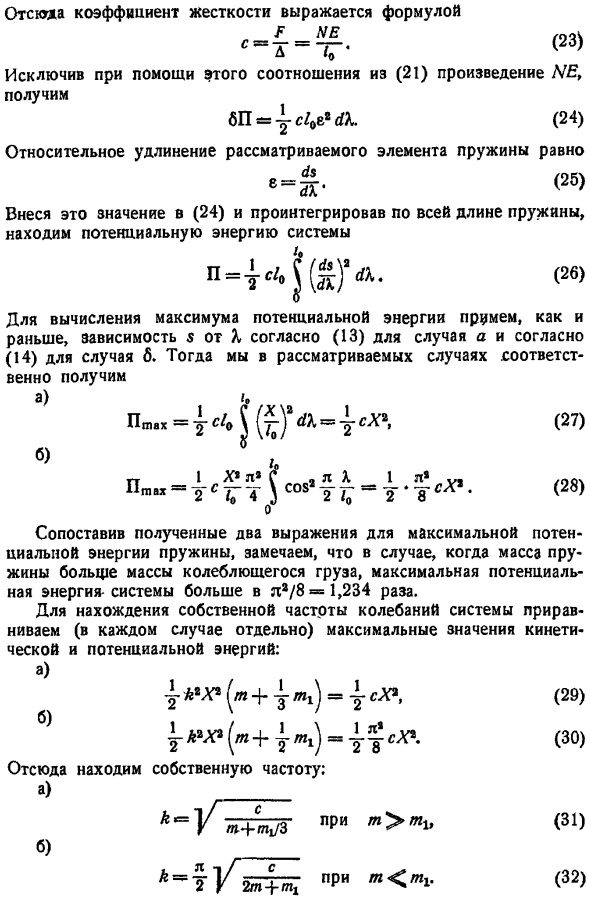
Таким образом, максимальная кинетическая энергия всей системы будет равна в каждом случае один 17 б 18 Приступим к расчету потенциальной энергии системы. Выбирая положение статического равновесия опорной точки, вы получаете потенциальную энергию системы, которая равна потенциальной энергии пружины. Для спиральных пружин с постоянным радиусом потенциальную энергию можно рассчитать, как в случае телескопической штанги. Потенциальная энергия натяжения или сжатия элемента длины dk равна 5н у УО, 19 Где a-напряжение, e-удлинение, а AZ-площадь поперечного сечения стержня. Используйте закон крюка, чтобы исключить стресс из 19. а ре 20 Здесь-это модуль упругости при растяжении или сжатии.
Затем выражение 19 преобразуется в следующий вид 6р — 21 абсолютное упругое удлинение стержня под действием тяги-натяжения F D л ФЛ. НЕОН- Итак, коэффициент жесткости выражается формулой 23 21 исключить продукт NE из этой взаимосвязи 24 6р cZee ДК. Относительное удлинение рассматриваемых пружинных элементов составляет 25 Вводя это значение в 24 и интегрируя по всей длине пружины, мы находим потенциальную энергию системы. 26 Чтобы вычислить максимальную потенциальную энергию, используйте зависимость s от X, согласно 13 случая a и 14 случая 6, Как упоминалось ранее.
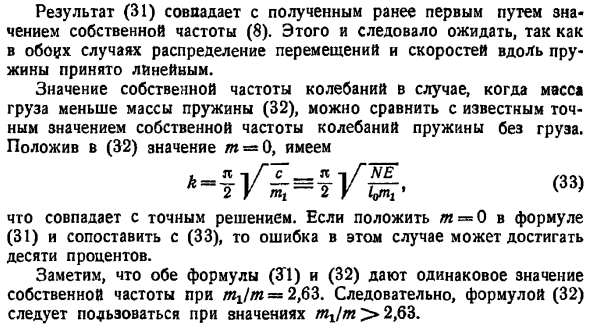
Затем, в рассматриваемом случае, каждый 2 1в 2 Сравнивая 2 Формулы, полученные для максимальной энергии положения пружины, можно видеть, что если масса пружины больше массы вибрирующей нагрузки, то максимальная энергия положения системы больше l 8 1,234 раза. Чтобы найти собственную частоту колебаний системы, уравняйте максимум кинетической энергии и потенциальной энергии в каждом случае. Отсюда найдите свою собственную частоту. Результат 31 совпадает со значением первой полученной собственной частоты 8.Этого следует ожидать, поскольку в обоих случаях распределение перемещения и скорости вдоль пружины предполагается линейным.
Значение 32 собственной частоты вибрации, когда масса груза меньше массы пружины, можно сравнить с известным точным значением собственной частоты вибрации пружины без нагрузки. 32 Если вы ставите значение w 0 33 это соответствует точному решению. Если положить m 0 в Формулу 31 и сравнить ее с 33, то погрешность в этом случае может достигать 10.
Смотрите также:
Предмет теоретическая механика
