
Оглавление:


Исследование автоколебаний аналитическими методами
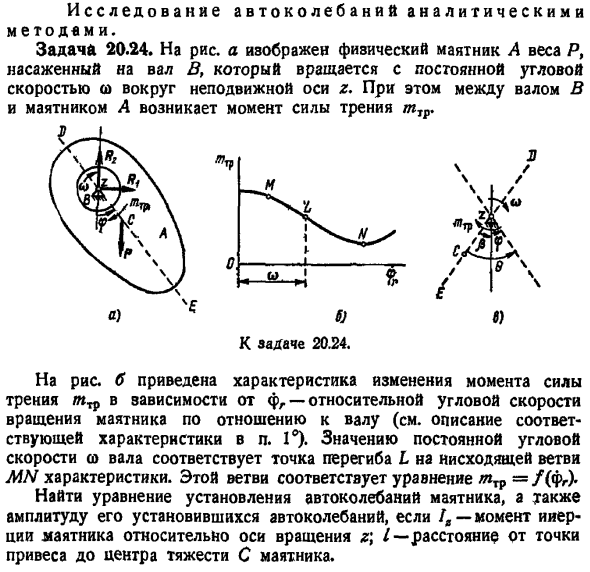
- Задача 20.24. На рисунке а показан физический маятник а веса Р, прикрепленный к вращающемуся валу В. Скорость вращения вокруг неподвижной оси r a. Случай электронного маятника A, момент силы трения t Угол вала Б В течение. По вопросу 20.24. На рисунке б, в характеристике изменения момента силы трения дана Мп, которая зависит от -относительной угловой скорости вращения маятника относительно вала см. Описание соответствующей характеристики на 1. Величина постоянной угловой скорости W вала соответствует точке перегиба G нисходящей ветви характеристики MY.
Эта ветвь называется уравнением- fD Если 7-момент инерции маятника относительно оси вращения, то находим уравнение для установления автоколебания маятника и амплитуды его установившегося автоколебания. r — расстояние от точки усиления до центра масс C pendulum. At в первый момент маятник был неподвижен и отклонялся от вертикали на угол 0.Игнорируйте радиус вала. Решение. Положение маятника определяется углом поворота, измеренным от вертикали. Проекция угловой скорости на ось z равна F. вращение маятника вместе с валом угловой скорости w раскладывается на переносное вращение относительно вала винтика угловой скорости. BW1 аппликации со О, если о — се. В этом случае со fшw ,, со -А.
Если в твердом теле имеется плоскость материальной симметрии, то любая ось, перпендикулярная к этой плоскости, будет главной в точке пересечения с плоскостью. Людмила Фирмаль
Так что вы получите o. 1 Используя формулу 1, разложим момент трения m19 f ph в ряд Тейлора степеней f. Tp f 1 f f f 0 co. 2 Здесь простые числа показывают производную по отношению к f. В качестве гипотезы постоянная угловая скорость соответствует точке перегиба b в ветви MM характеристики момента трения см. Рисунок B n1p fD со 0. 3 Обратите внимание, что ветка DS не работает со О 0. 4 Принимая во внимание равенство 3 и ограничивая его членом разложения вычисления, включая умножение на 3, запишем Формулу 2 в следующем виде m1p — 8 5 приступим к построению дифференциальных уравнений для вращения маятника вокруг неподвижной оси R.
При отклонении маятника в сторону увеличения угла поворота СР к маятнику со стороны вала прикладывается момент трения по часовой стрелке см. рисунок а. Форма дифференциального уравнения для вращения имеет вид 4рн БК П 4-тг ПКС с-м П2 имея в виду использовать формулу 0 — ппф P ППФ,, Р px г p2 0, m — — M1 1, и взять формулу 5 около 61п 4 — P1y- co — co -y co. 6 На рисунке с показано положение статического равновесия осевого ээ маятника с осью вращения по часовой стрелке с угловой скоростью w. In в этом положении маятник отклоняется на угол P. So если 0 и 0, то p — 0.Подставляя эти значения в уравнение 6, находим статическое равновесное состояние. РФ — 0.
Из положения статического равновесия переходим к обратному отсчету угла поворота маятника 9.Использование photos. So у нас есть p 0 — 8 И так оно и есть. p 6, b. 9 При введении соотношений 6 в формулы 8 и 9 49 ПК П — со ш 6- Колорадо 6а. У Используя условие 7, запишите формулу 10 в виде 6 MF a b 29 0, если показано И 12 Если мы рассмотрим неравенства 4 1 0, n8 0. 13 Легко видеть, что формула 10 и Формула 1, приведенные в обзоре теории, являются identical. As в результате маятник совершает собственные колебания. Запишите выражение 11 в следующем формате Б 4-ААО −2 0-ЛД3. 14 Аналогичное уравнение в задаче 20.6 1 было интегрировано эквивалентным методом линеаризации.
Разница между этими уравнениями состоит лишь в том, что в задаче 20.6 она была Л1 0, а в данном случае Л1 0. Как и уравнение в вопросе 20.6 3, Найдите 9 и 6 в следующем формате 6 a81pf, b asoso8f. 15 Используйте это уравнение, не повторяя решение задачи 20.6 8 и 9 a— 1 y L. 16 17 18 Из дифференциального уравнения 17 следует k1 4-C1. Где Cx-интегральная константа. Напомним, что в выпуске 20.6 было 0,,, и 0.In в этом случае х 0, 0 см. 13.
Таким образом, если вы интегрируете выражение 16, вы получите другой результат, чем решение выражения 8. Отделить переменные дифференциального уравнения 16, записать Сим. Введя обозначение 19 20 Выражение 19 выражается в следующем виде И о 1-х а 21 При интегрировании формулы 21 1 1, Х Х a 1-X o и H 2 1-Ha 2 1 Ha Ты найдешь его. Год 1-х а Если мы решим это уравнение относительно a, то получим Один а xT7 х, с, г г Введем результаты 18 и 22 в уравнение 15.
Потому что М ко- 23 Для 2-го выражения 23 рассматривается 2-е выражение 7 в вопросе 20.6 w L Согласно условиям задачи, Если 0, то — p0, то 0.Используем 8 и 9 для описания начальных условий этих движений в виде pr1 6 имеем 9 Фо, 6 0.Подставляя их в 23, получим систему уравнений о йжж5 1 Да. К к СЗ потому что вода Если вы решите эту систему 1-у r i Ф Оле Р7 С1 Т 24 Подставив значение первого уравнения 23 24, учитываем 0 p — 7 cos k1-0 Их Фо 11-х ФО е 25 Здесь, согласно формуле 7, 0 a P7. Формула 25 описывает необходимый режим для установления автоколебаний маятника.
Эти колебания, вызванные моментом силы ярма между валом и маятником, происходят при постоянной круговой частоте k и переменной амплитуде. а 0 г Х р 1-х Фо П Со временем 1 увеличивается и становится пределом, равным следующему значению. Мапс 0 Ита — —— 1 — Со — со х ФО 1-х ФО Е К Рассматривая выражение X 20 а Нта -ОО 26 Куда −1 г а 6 Поэтому установленный процесс вызывает автоколебания с постоянной угловой амплитудой 260 26, не зависящей от начального положения маятника. В зависимости от условия задачи необходимо определить только амплитуду установившейся автоколебательной области, а если необходимо обойти интегралы уравнений 16 и 17, то желаемый результат может быть получен immediately.
Дело в том, что если амплитуда а постоянна, то 1-я производная от i равна zero. So, мы получаем результат непосредственно, принимая во внимание, что правая часть Формулы 16 равна нулю, и- 1 4 26. В заключение рассмотрим движение маятника, который, помимо момента трения между осью и маятником, также имеет момент вязкого трения, который изменяется по закону u, жx — 6.Где b 0, а p-проекция угловой скорости маятника на ось d.
Если этот дополнительный момент существует, то выражение 6 принимает вид Л Р Ф- — о Ф — Если перейти к углу поворота 0, который мы отсчитываем от положения статического равновесия, то получим формулу 11.Где К2 и N3 Значение указывается по формуле 12, а после 2p3 L Не показанный 27 Быть 19 Так… См. формулу 26, где поскольку b 0 и a w 0, коэффициент 2n1 равен положительному, отрицательному или нулю.
- Повторите решение уравнения 11, чтобы получить уравнение, интегрированное выше для случая 0. Согласно обозначению 27, Если s 0, то маятник совершает самовозбуждающиеся колебания с амплитудой a y B r Кроме того, мы рассмотрим следующие случаи для nx 0, то есть для b — — w 0, выражение 19 принимает вид П, если 29 Уравнение 28 было интегрировано в процессе решения задачи 20.4.Напишите решение см. 390 задача 20.4 Формула 12 е-н Запрос — — нет, нет, нет, нет. 30 Где и y задаются формулами 27 и 29.
То есть происходит движение сырости маятника. Если 1 1 0, то есть k l a 0, то из Формулы 16 Д — ра Где это показано Р — — Ма 0. 31 Разделите переменные y aa—P Интеграл, получаем Один В 2р — — С1 32 Где Р задается выражением 31. когда — , А — 0, то есть движение маятника ослабляется. Так, если имеется дополнительный момент вязкого трения m, — , b 0, но 1 1 0, т. е. b s 0, то маятник совершает автоколебание по закону y- 26. — П1.- если в A1 0 и 0, т. е. 5 o 0 Ф.
Главная ось инерции, проходящая через центр тяжести твердого тела, называется главной центральной осью инерции и является главной в любой своей точке. Людмила Фирмаль
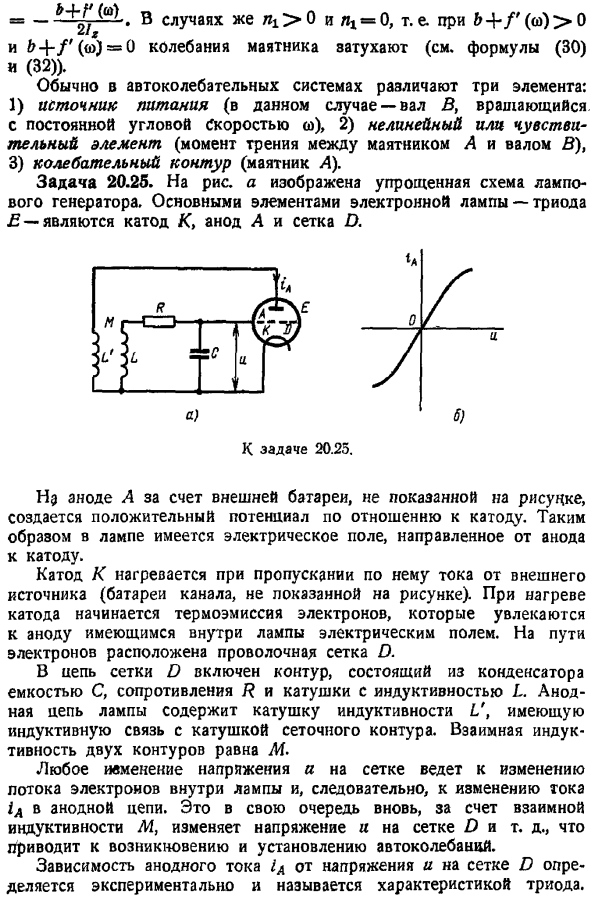
Вибрация маятника-сброса см. уравнения 30 и 32. Обычно в автоколебательных системах различают 3 элемента 1 источник питания в данном случае вал вращается с постоянной угловой скоростью D , 2 нелинейные или чувствительные элементы момент трения между маятником А и валом в, 3 колебательный контур маятник а Задание 20.25.На схеме показана упрощенная схема лампового генератора. Основными элементами электронной лампы, триодом в которой является катод к, анодом а и решеткой О. N анод a, внешняя батарея, которая не показана на рисунке, создает положительный потенциал для cathode. So, лампы имеют электрическое поле, которое направлено от анода к катоду.
Катод к нагревается при протекании электрического тока от внешнего источника канальная батарея, на схеме не показана. При нагревании катода начинается тепловая эмиссия электронов, которая переносится на анод электрическим полем внутри лампы. Существует проволочная сетка O на пути электрона. C, схема, состоящая из конденсаторов емкостью 7 сопротивлений Катушка индуктивности b. анодная цепь лампы содержит индуктор b с индуктивной связью с катушками цепи сетки. Взаимная индуктивность двух цепей равна J. При изменении напряжения а на сетке изменяется поток электронов внутри лампы, в результате чего изменяется ток 1А в анодной цепи.
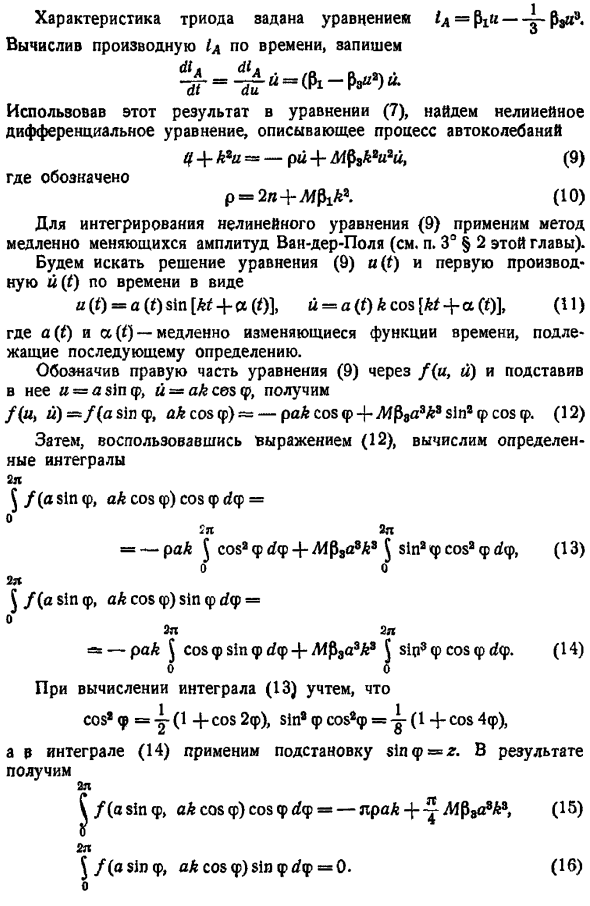
Это также изменяет напряжение сети Rhit за счет взаимной индуктивности W. D. Это приводит к возникновению и установлению автоколебаний. Зависимость анодного тока 1А от напряжения и сетки Р определяется экспериментально и называется триодной характеристикой. Типичные характеристики ламп показаны на рисунке. приближенный с b и уравнениями л Р1 Где 01 и 0-положительные константы. Найти закон изменения напряжения сети при установлении автоколебаний и постоянного значения амплитуды напряжения в установившемся режиме. Найти как затухание колебаний, так и условия самовозбуждения. Начальные условия Если 0, то u u0, то u-u0. Решение. Примените 3-й закон Кирхгофа к контуру сетки.
При отсутствии источника Э. Д. С. Сумма падений напряжения в этом замкнутом контуре должна быть равна нулю. К1 йа с ИЖ — 1 Падение напряжения на катушке q 2 Где G-самоиндукция катушки, а y-заряд. Сопротивление падение напряжения и — это уравнение 3 Падение напряжения конденсатора определяется зависимостью 4 Где с-емкость конденсатора. Падение напряжения тока причиненное явлением взаимной индуктивности 61. им м — — б Где M-взаимная индуктивность 2 катушек, а a d-анодный ток цепи. 2 — вводя результат 5 в уравнение 1, б Ч — M — — 0 найдено. 6 Разделите уравнение 6 на 1C и замените переменную формулой d C. Где a-напряжение на сетке.
Свойства триода задаются формулой l P1 — UR 3. Вычислите производную от связанной со временем 1a и запишите ее следующим образом Используя этот результат в уравнении 7, находим нелинейное дифференциальное уравнение, описывающее процесс автоколебаний. Ц к2и—рй Мр3к иай, 9 Где это показано Р 2л lf1h плеер 10 Для интегрирования нелинейного уравнения 9 мы применяем метод ван-дер-поля медленно изменяющихся амплитуд см. Главу 3, 2. Найти решения выражений 9 и 0 и решение первой производной d время в виде 0. 0-а 0s1n х 0,д а 0isos А 0 Где a 0 и a 0-медленно меняющаяся функция времени, определенная позже.
Если обозначить правую часть уравнения 9 через u, d и присвоить m az1pf, w axes p u, d a81Pf, aAsozf — paAso5p — — L1p8a3z31n8fo5f 12 далее используйте формулу 12 для вычисления конкретного интеграла 2л az1p Ф Ак со Ф соз ф г Ф О 2-й 2-й — Созь Ф Ыф Л4 rza8A 81pa Ф soz2 ф ф, 13 О, да. Второй а 81n Ф Ак сов Ф 51n Ф Ыф О ГИА 2л — соз Ф рак я Н ф Д Ф М 3a3k 81r3fsozfyfyf. 14 При вычислении интеграла 13 следует учитывать следующее применение заместительной 51Pf р с COS ф г 1 потому что 2-ой этаж, 31Р с08 ф г 1 в COS 4Ф, и Интеграл 14.Результат Зло azShf, Ак со Ф соз Ф Ыф -yarakMrgaRk , 15 2л аз НЧ, aAsozph s1pf 7п 0.
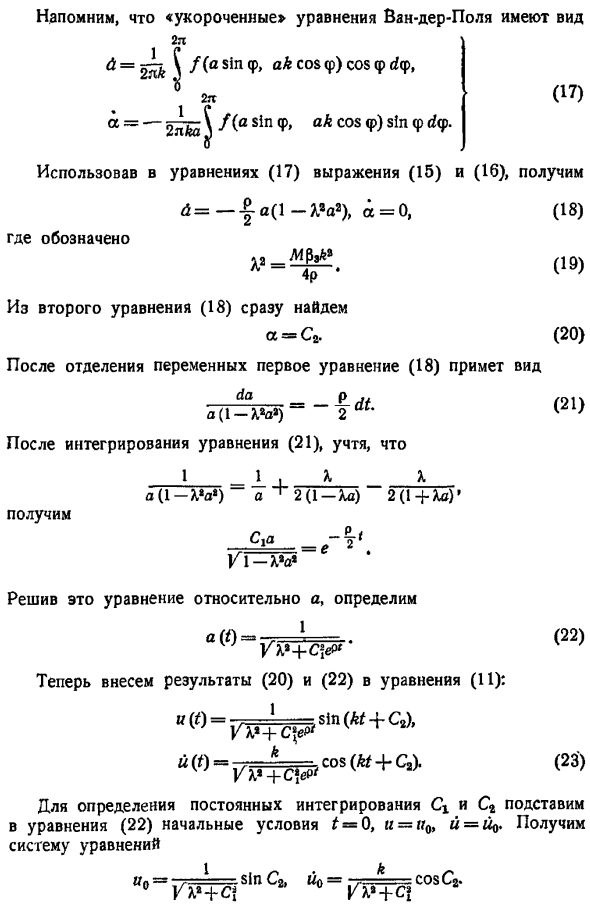
Форма укороченного уравнения ван дер поля е — 2р в 51n Ф, Ак сов Ф С Ф Ыф Второй 2ля w81pf, ak C08 f s Н ф Иф. И Используя формулы 17 Формулы 15 и 16, получаем d — a 1-LM , a 0, 18 Если отображается 12 лир, 4p 19 Из 2-го уравнения 18 а С2. 20 После разделения переменных первое уравнение 18 принимает вид АА Р М 21 а 1-х а −2 После консолидации формулы 21 Мы получаем 1 X 1, X a 1-X A a 2 1-Xa 2 1 — — Xa 1-х а 22 23 После решения этого уравнения относительно a определим следующее а 0 — р. —.
Затем введите результаты 20 и 22 в уравнение II — pY Пи N u СЛy , — нн Unit единица измерения Для определения интегральных констант и Cr назначьте начальные условия 0, u n0 и u yo в выражении 22.Получаем систему уравнений 1.Для ТСЛ-г 81P б 2, Лл-г и Соз С2. 0 ка с Х Х Решая эту систему, вы найдете — и 34-й 1 kG C Ca ags1 y2 0. Присвоьте эти значения и Ca первому выражению 11, чтобы определить желаемый процесс установления автоколебаний Он был добр. 0 UA Ts Ch-й —— 8 n mnHe Y 24 Д Ж М — Ж уг 1 4 о Осталось найти условия демпфирования, а также условия самовозбуждения oscillations. To сделайте это, используя формулу 22, чтобы сделать переход к пределу как — oo.
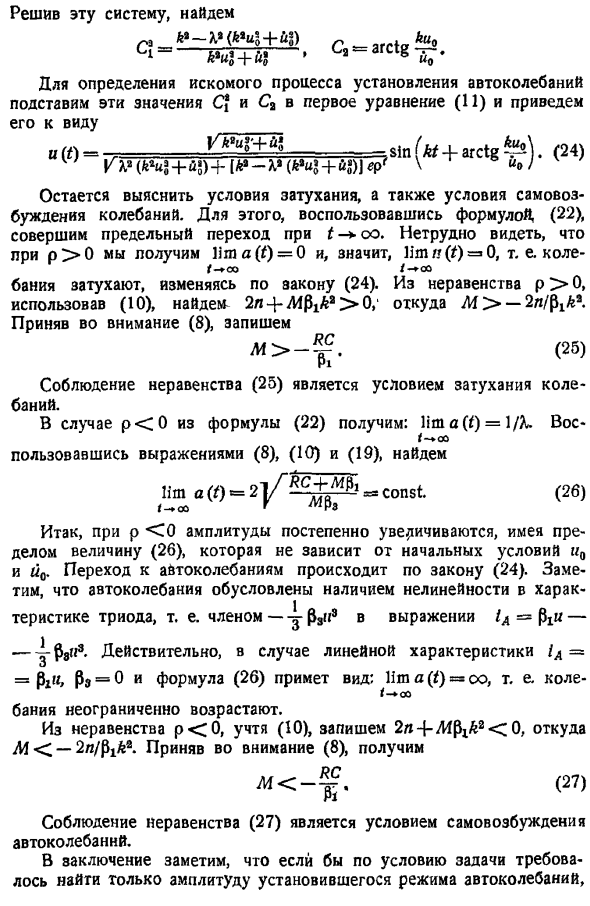
Если p 0, то Hm a поскольку 0 0, ТО 0 то есть — — СО СО — с с Баня распадается и изменяется в соответствии с законом 24.Из неравенства p 0 используем 10, 2n- где M — 2l r1A. 8 рассмотреть М. — 25 P1 Соблюдение неравенства 25 является условием демпфирования колебаний. при p 0, из Формулы 22, 11 0 1D. Vos — — с использованием формул 8, 10 и 19 Пятница 0 21 — const.1. 26 — ОО Так, при p 0 амплитуда будет постепенно возрастать с пределом 26, не зависящим от начальных условий n0 и w0.Переход к автоколебаниям осуществляется в соответствии с законом 24.Автоколебания обусловлены нелинейностью характеристик триода, то есть термином-pu3 в Формуле уравнение d px—yPa.
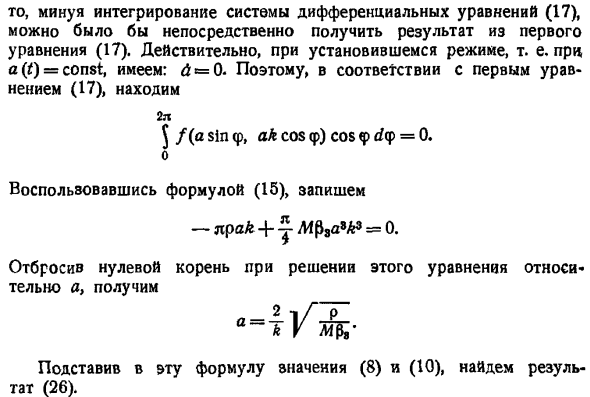
Фактически для линейной характеристики d P1 Pz 0 и Формула 26 принимает следующий вид Ita 0 oo, т. е. если — .Ноль ноль Баня растет до бесконечности. Из неравенства p 0, принимая во внимание 10, в 2n — — Mp1k2 0, M — 2l pxA И пиши. 8 рассмотреть М.- 27 Соблюдение неравенства 27 является самоподобным условием автоколебаний.
Смотрите также:
Предмет теоретическая механика
| Дельта-метод | Исследование автоколебаний на фазовой плоскости |
| Автоколебания. Примеры автоколебательных систем | Геометрические величины, или векторы |
