
Оглавление:


Исполнительные двигатели постоянного тока
Исполнительные двигатели постоянного тока. Цель и требования исполнительного органа motor. In новейшие системы автоматики и телемеханики, маломощный исполнительный двигатель от 1 ваттминут до нескольких киловатт переменного тока широко используются в качестве преобразователя для механического вращения электрических сигналов в некоторых автоматизированных устройствах. Наиболее распространенным является двигатель с максимальной мощностью 100 Вт. Маловероятно, что исполнительный двигатель будет работать в номинальном режиме. Для них характерны частые старты, остановки, инверсии. Исполнение автоматической схемы детали работы электродвигателя определяют следующие основные требования к исполнению электродвигателя: Отсутствие самоходно-автоматического торможения двигателя при снятии сигнала (управляющего напряжения).
Несмотря на некоторые существенные недостатки, связанные с наличием скользящих контактов между щеткой и коллектором, в качестве привода широко используется специально разработанный двигатель постоянного тока с независимым возбуждением (часто возбуждение постоянным магнитом). Людмила Фирмаль
- Стабильная работа двигателя в широком диапазоне регулирования скорости. Линейность механических и регулировочных характеристик; Высокий пусковой момент. Управление низкой мощности с механической силой большой достаточно для вала. Высокоскоростной; Надежность работы, небольшие габариты и вес. В СССР, постоянного тока, постоянного тока электродвигатели типа СЛ, Ми, DPM и другие были изготовлены, и конструктивно они изготавливаются таким же образом, как и другие микромашин постоянного тока (см. рис. 1.1).Их магнитная система полностью пополняется из изолированных листов электротехнической стали.
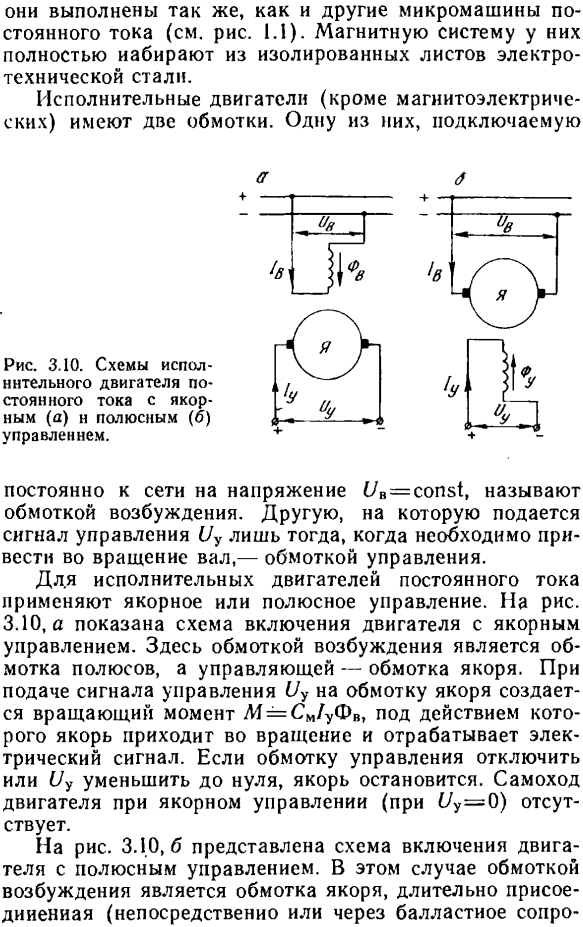
Есть 2 обмотки для исполнительного двигателя (за исключением магнитного электричества).1 из них подключены Рисунок 3.10.Иллюстрация исполнительного двигателя постоянного тока с элементами управления якоря (а) и Полюса (6). Постоянное напряжение в сети {/V = soP51, называемое обмоткой возбуждения. Управляющий сигнал 1) подается еще на 1 обмотку управления только тогда, когда необходимо повернуть вал. Для двигателей постоянного тока постоянного тока используется якорь или Полюс управления. На рисунке 3.10 показана схема, включающая двигатель с якорным управлением. Здесь обмоткой возбуждения является Полюсная обмотка, а обмоткой управления-обмотка якоря. Когда управляющий сигнал (1)подается на обмотку якоря, создается крутящий момент L1 = Cm / uFv, который заставляет якорь вращаться для обработки электрического сигнала.
- Если вы перережете обмотку управления или уменьшите ее до нуля, якорь остановится. Отсутствует самоходный двигатель с якорным управлением (6Uy = 0). На рисунке 3.10.6 показана схема, включающая двигатель с полюсом control. In в этом случае обмотка возбуждения представляет собой обмотку якоря с длинным соединением (непосредственно или через балласт Сопротивление)■ток якоря до напряжения 1 / V, здесь ток возбуждения/ V. управляющее напряжение 11y во время испытания подается на полюс winding. In Привод постоянного магнита позволяет только управление анкера. Рассмотрим характеристики исполнительного двигателя с различными методами управления. Двигатель с якорным управлением.
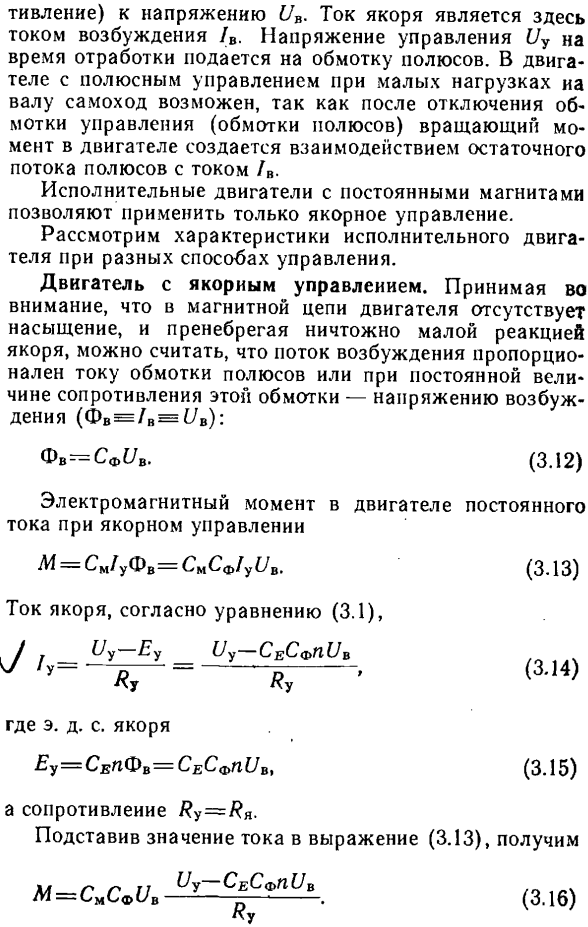
Если учесть отсутствие насыщения в магнитопроводе двигателя и пренебречь пренебрежимо малой реакцией якоря, то можно предположить, что магнитный поток пропорционален току в полярной обмотке или, если сопротивление этой обмотки постоянно, пропорционально напряжению возбуждения.) : Фвг=Сф[/в. (3.12) Электромагнитный момент двигателя постоянного тока c якорным управлением (3.13) M =С» / UVB =С » СФ / У * / В. Ток якоря согласно уравнению (3.1)、 /, Щиу-СЕСФпив/ои\ Y / y = ^ = dG ’ (3-14) е. д. якорь с Eu = SBnPf = CESfn1} c, (3.15) и сопротивление/?Y =#i. M = SmSFU1 У-СЕСПП I)\ И (3.16) Путем присвоения текущего значения выражению (3.13): Для придания характеристикам двигателя универсальности независимо от мощности и конструктивных особенностей при анализе исполнительного двигателя используется система относительных единиц.
Управляемый двигатель полюса, после того, как обмотка управления (обмотка полюса) выключена, крутящий момент двигателя генерируется остаточным потоком полюса и взаимодействием тока/вольта, поэтому можно самостоятельно продвигаться при низкой нагрузке вала. Людмила Фирмаль
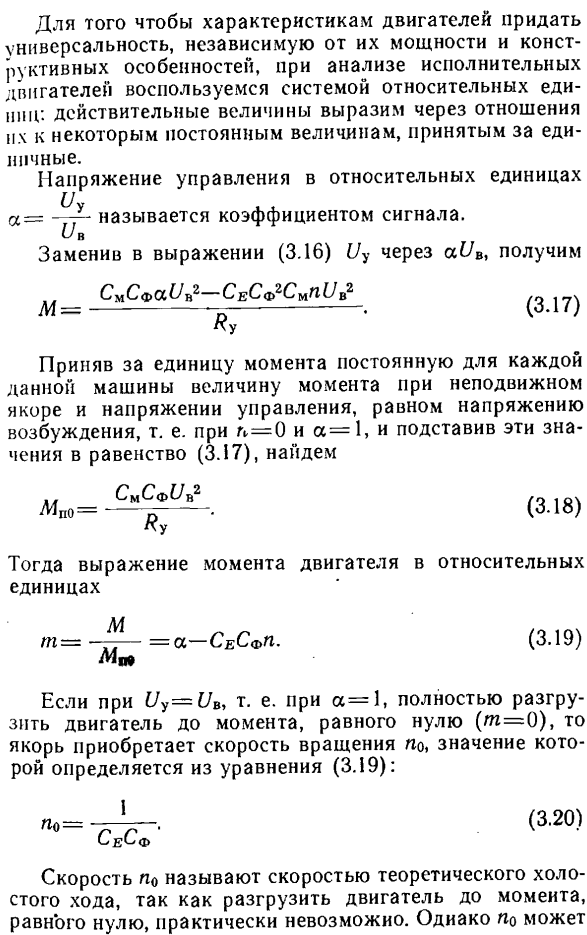
- Представляет фактическое значение по отношению к 1 постоянному значению. Каждую ночь. Относительное напряжение управления блока {/год a = yy называется коэффициентом сигнала, а s / in М = IMSFOS ^ / C2-SESP2CMEL ^ B2 (3.17) Замена выражения (3.16) с 11b на 11b> М Около используйте sFg / B2 (3.18) Для единиц постоянной момента каждой данной машины возьмем управляющее напряжение, равное неподвижному якорю, и напряжение возбуждения, то есть моменты при n = 0 и a = 1, и подставим эти значения в уравнение (3.17).、 Т = М о.-ЦИК ФП. (3.19) Тогда представление момента двигателя в относительных единицах I] если y = Tsv, то есть ss = 1, это полностью разгрузит двигатель.
Смотрите также:
