
Оглавление:


Интегрирование дифференциального уравнения и определение постоянных
- Интеграция производных инструментов Уравнение и определение константы Для получения аналитического представления прогиба и угла поворота необходимо найти решение дифференциального уравнения (9.5). Поскольку правая часть уравнения (9.5) является известной функцией от x, мы получаем простое дифференциальное уравнение. Если вы интегрируете его в первый раз, вы увидите,
что^7=±]E7+ Эта формула определяет закон изменения угла поворота касательной по длине луча. После завершения операции мы находим уравнение оси криволинейной балки: В=±У — ^^Х+с CX4-а). для вычисления интегралов, содержащихся в (b) (a) и (b), необходимо сначала написать аналитическую формулу для изгибающего момента и жесткости. Интегральные константы С и А) взяты из граничных условий, зависящих от способа фиксации балки. Прояснить.
274П Р и М Е Р1. Для получения выражения угла отклонения и поворота Людмила Фирмаль
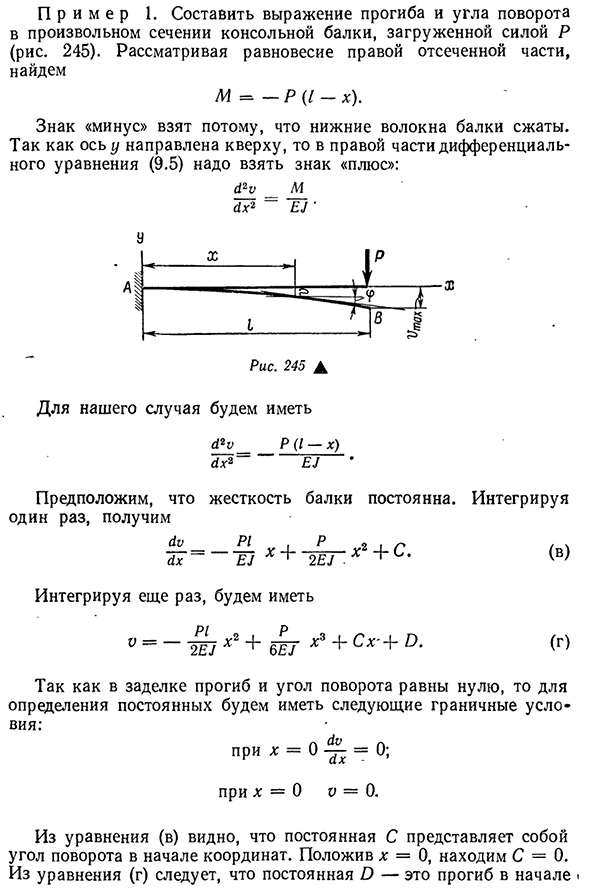
каждой секции консольной балки, нагруженной силой Р (фиг.245). Учитывая равновесие правой отрезной части、 Л4= — Р(I-х). Из-за того, что волокна под балкой сжимаются, берется знак минус. В правой части дифференциального уравнения (9.5) нужно взять знак «плюс», так как ось Y направлена вверх»: Сайт a2u м AH2~е г Рис 245а Для нашего случая мы имеем Р(I-х) Предположим, что жесткость балки постоянна. После интеграции、 %г= — 1х+4г х+с — Еще раз, чтобы
консолидироваться, у нас есть В-6ET(г ) Поскольку угол отклонения и поворота уплотнения равен нулю, для определения константы используются следующие граничные условия: если x=O (1U) (1Х Когда X=O V=0. Из уравнения (b) видно, что константа C-это угол поворота в начале координат. Поставим X=0 и найдем C=0. Из уравнения (d) следует, что константа y является отклонением в начале I 275 если поставить уравнение координации (g) x=O, то получится O-0. Итак, у нас есть R1x2R Х3 2ЕТ~+ «6E7″‘ (IV_R1x Р Х2 Из рисунка 45-0x—E T+2E1.
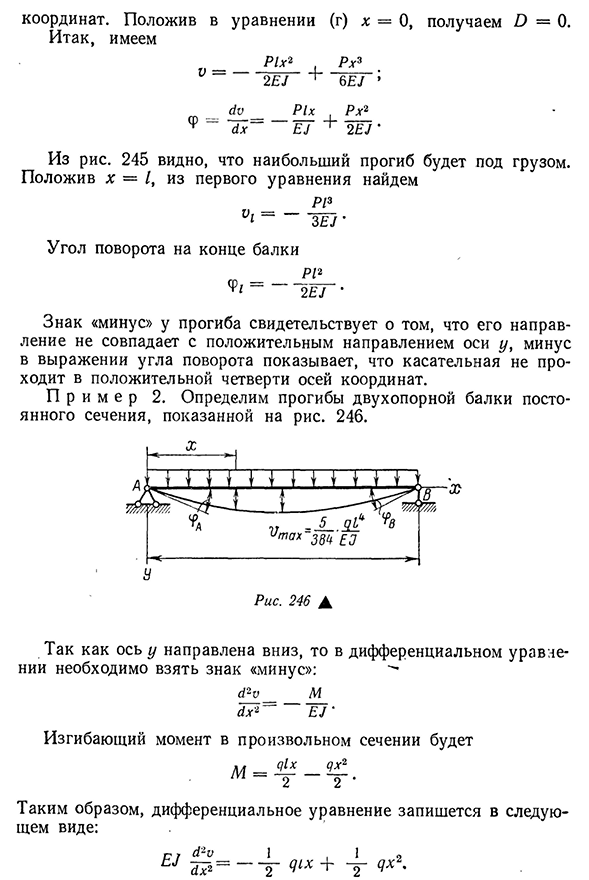
- Вы можете видеть, что максимальное отклонение 245 находится под нагрузкой. Положим X=I, находим из первого уравнения П13 — За вами. ] Угол поворота в конце балки Р12 Знак минус отклонения указывает на то, что его направление не совпадает с положительным направлением оси y, а знак минус формулы угла поворота указывает на то, что касательная проходит в положительной четверти оси координат. П р и М Е Р2. Определим прогиб второй опорной балки в постоянном сечении, показанном на рисунке. 246. Поскольку ось Y направлена вниз, то в дифференциальных уравнениях необходимо
принимать знак»минус»: (Ру м AH2=~~E7 ‘ изгибающий момент в любом сечении будет равен Дл Х1Х W2 2 * Таким образом, дифференциальные уравнения описываются в следующем виде: 1 1р 276 последовательный Интеграл=^+^+C;(D) Е1 » = — — — — — тг++СХ+°-(е) Чтобы определить две константы C и O, вам нужны два условия. В этом случае отклонение левого и правого концов равно нулю. Итак, граничное условие для x=O V-0, для x=I V-0. Если подставить уравнение (e) x=0 и уравнять отклонение до нуля, то получим=0. 12+I24 4-C1/ — I0- И так оно и есть., г _ С » 24″*
Подставляя значения найденных констант в уравнения (d) и (e), получаем уравнения отклонения и угла поворота: 4х24 4х+6′ По горизонтальной оси x Людмила Фирмаль
задано постоянное значение, получаем численное значение отклонения и угла поворота в конкретном сечении балки. Поэтому можно рассчитать прогиб и поворот поперечного сечения среднего пролета, четверти пролета и т.д. Если в точке, где прогиб наибольший, а функция прогиба наибольшая, то для нахождения этой точки необходимо обнулить уравнение первой производной от V, то есть угла поворота. В этой задаче максимальное отклонение определяется из условия симметрии. Он находится в середине пролета. Если поставить X= — y-、 5д? Если момент (или жесткость) имеет разные законы изменения в разных частях балки, то необходимо составить несколько соответствующих дифференциальных уравнений 277-й округ соответственно,
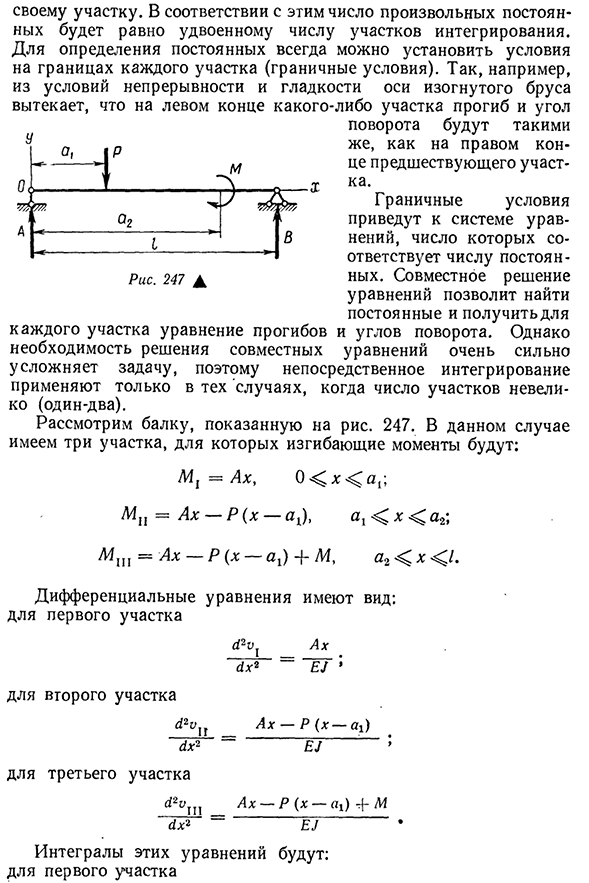
количество любых постоянных будет равно удвоенному количеству интегрированных участков. Для определения константы всегда можно задать условие на границе (граничное условие) каждого участка. Так, например, из условий непрерывности и гладкости оси изогнутого стержня левый конец любого участка имеет тот же угол отклонения и поворота, что и правый конец предыдущего участка. Но Около Рис 247Л м Граничное условие приводит к системе уравнений, в которой число соответствует числу констант. Совместное решение уравнений позволяет найти постоянную величину и получить
уравнение отклонения и угла поворота для каждого участка. Однако необходимость решения совместного уравнения значительно усложняет задачу, поэтому прямое интегрирование применяется только тогда, когда число узлов невелико(один или два). Рассмотрим балку, показанную на рисунке. 247 в этом случае изгибающий момент выглядит следующим образом:: L4P=х-р(х-а),m1i по-Ах-Р(х-АГ)4-м , Дифференциальные уравнения следующие:Для первого раздела А x4x * ЕС Для второй части Х-р(х-АА Д. Х2 ЕС Для третьего раздела y2u1p х-р(х-а м YL2E/ Интегрирование этих уравнений выглядит следующим образом: .278_Lh3 °1 «6E/4″ +^2 5 Для второго раздела _x3 °Р » 6Е^ Р (х-
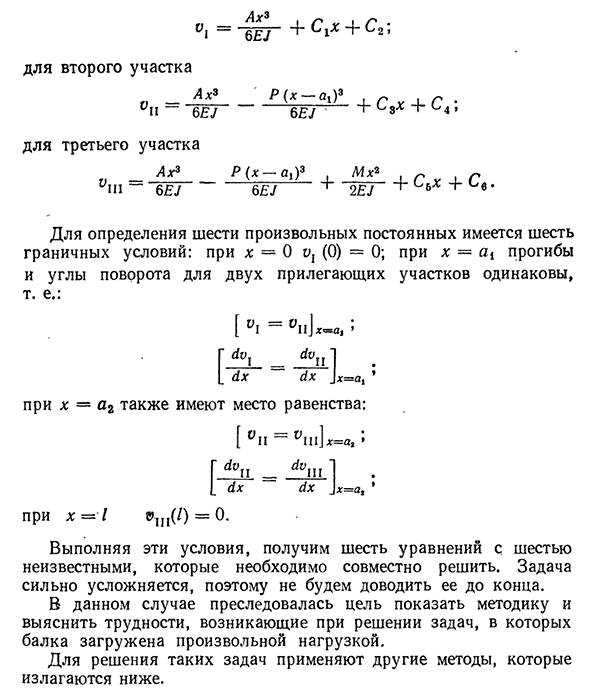
Ах)3 6EG+S3h4-С4 ; Третья фаза AH3R (h-AG)3- » 6E7 6E7 4- L1X3|(2ЕТ~+Б’ Если X=0(0) — 0, то x = прогиб и угол поворота двух соседних участков одинаковы.: [«1= ; когда X-A2 также имеет уравнение: [°11~^Вт] х=А2′ (1х в x=1®1P (/)=0. Для удовлетворения этих условий получены шесть уравнений с шестью неизвестными. Задача гораздо сложнее, поэтому мы не будем доводить ее до конца. В данном случае его целью было показать метод и найти трудности, возникающие при решении задачи, в которой балка нагружена каким-либо грузом. Для решения таких задач используются другие методы, описанные ниже.
Смотрите также:
