
Оглавление:


Инерциальные системы отсчета
- Переносимое ускорение в общем случае рассчитывается по следующей формуле e = b0 + £ x g + th x (th x g), Где a0 — ускорение точки, которая считается полюсом, например, начало координат в движущейся системе координат. d — угловая скорость вращения движущейся системы координат вокруг выбранного полюса. £ = dw / d <- угловое ускорение этого вращения. g — радиус-вектор движущейся точки относительно выбранного полюса. Движущаяся система отсчета всегда перемещается постепенно, равномерно и линейно по отношению к основной инерциальной системе.
Следовательно, для существования возможной диаграммы равновесия с определенной волной, если давление T меньше этого предела, единственной возможной диаграммой равновесия должна быть прямая линия. Людмила Фирмаль
В этом случае сила переносной инерции и сила инерции Кориолиса равны нулю. Fc = -tae = 0-, f, = -ta, = 0, Для поступательного движения d = 0 и J = dd> / d / = 0. Ao = 0 для равномерного линейного движения. Таким образом, в этом случае мы получаем уравнение относительного движения из (3). та = P + H, (6) Это согласуется с уравнением движения для инерциальной системы отсчета (1). Все движущиеся системы отсчета, которые движутся постепенно, равномерно и линейно относительно основной инерциальной системы отсчета, также называются инерцией. Такое же уравнение движения получено для всех инерциальных систем отсчета. Ускорение материальной точки для всех инерциальных систем отсчета одинаково.
- Основываясь на наблюдениях за движением материала, отсутствие фундаментальных возможностей механических экспериментов отличить одну систему инерции от другой основано на принципе относительности классической механики принципа Галилея-Ньютона. Базовый: или механическое движение не может обнаружить инерционное движение системы отсчета и участвовать в этом движении. Наоборот, неинерциальные системы отсчета могут быть обнаружены и отличены друг от друга посредством неинерционной коррекции. Хотя скорость точек массы для разных инерциальных систем отсчёта различна, нет способа наблюдать, какие из инерциальных систем отсчёта являются базовыми, фиксированными и подвижными, наблюдая за движением точек массы в разных системах отсчёта.
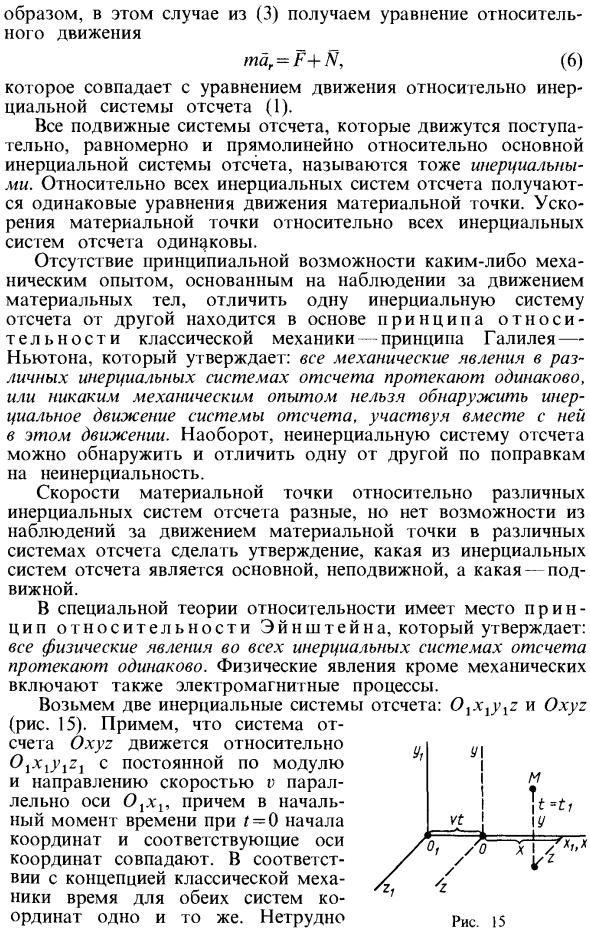
В специальной теории относительности справедлива теория относительности Эйнштейна. Физические явления включают электромагнитные процессы, а также механические явления. Давайте рассмотрим две инерциальные системы отсчета, OlxJyiz и Oxyz (рисунок 15). Предположим, что система отсчета Oxyz движется относительно OjXiJ’jZj с постоянной скоростью v в абсолютном направлении и направлении, параллельном оси Otxt, и в первый момент t-0 начало координат и соответствующая ось координат совпадают.
Однако если снаряд сферический и не вращается, то результат получается в вертикальной плоскости, включающей скорость центроида, а траектория этой точки плоская из-за симметрии. Людмила Фирмаль
Согласно концепции классической механики, время для обеих систем Ордината точно такая же. Это легко Рисунок 5 U, VI Вы можете видеть, что координаты точки M в двух инерциальных системах отсчета связаны параллельным транспортным соотношением. У нас есть: x = xt до vt; y = yi, z = zi, t = tv (7) Эти отношения называются преобразованиями Галилея в конкретном случае относительного движения двух инерциальных систем отсчета. Преобразование Галилея не меняет форму уравнения движения для точки (1). Другими словами, он инвариантен относительно преобразования Галилея.
Смотрите также:
Задачи по теоретической механике
| Дифференциальные уравнения относительного движения материальной точки | Движение точки относительно земли |
| Относительное движение материальной точки. Частные случаи | Маятник Фуко |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
