
Оглавление:
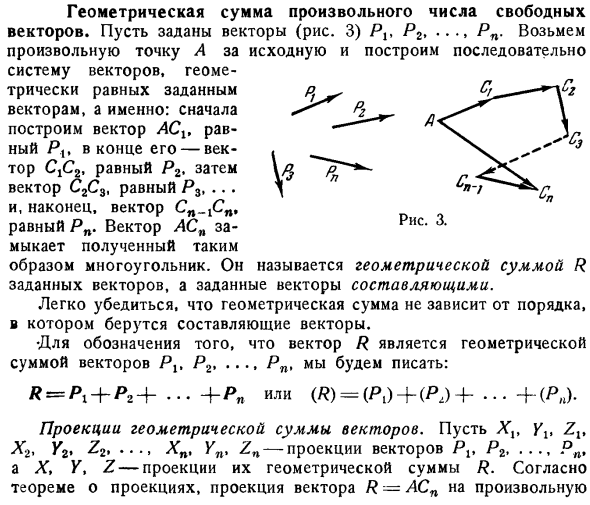


Геометрическая сумма произвольного числа свободных векторов
- Постройте последовательно с любой точкой A первой точки. Система векторов, геометрически равных данному вектору, т. е. сначала построить вектор, равный P, затем построить вектор C C2, равный P2, затем построить вектор c2c3, равный P3, и, наконец, построить вектор Cn 1Cn, равный Pn. Вектор, как таким образом будут закрыть полигон. Он был Геометрическая сумма, называемая P Указанный вектор и вектор, указанный как компонент.
Движение наэлектризованной частицы в наложенных друг на друга электрическом и магнитном полях. Людмила Фирмаль
Нетрудно заметить, что геометрическая сумма не зависит от порядка, в котором берется компонент вектора. Вектор P это вектор Pp P2… Чтобы указать, что PN является геометрической суммой, мы пишем: Р = Р1 + Р2 + … + P или P = P + P+ … + П. Проекция геометрической суммы вектора. Х,, УР, 2Р Х2, У2, 22…… Вектор ПП П2, х, г, 2Н……. Проекция П Согласно теореме о проекции, проекция на любую ось вектора P = ACn является суммой проекций сторон многоугольника AC C2… Cn, то есть равна сумме проекций вектора компонента. И так оно и есть.
- Сумма векторов равна нулю. Если точка Cn совпадает с точкой A, то сумма P равна zero. To для этого необходимо и достаточно, чтобы X, Y, 2 были равны нулю. Примечание: пусть P любой вектор. Если… + АРМИРОВАННЫЙ ПЛАСТИК Затем, когда вы получаете скалярный продукт, он выглядит так: + … + РРЛ. Это уравнение является проекцией вектора K на вектор P, но вектор Pb P2…
Приложение к движениям, происходящим под действием силы, зависящей только от положения. Людмила Фирмаль
Случай, когда сила не зависит от длины дуги. Формула, определяющая натяжение, когда существует силовая функция. Пример существования бесчисленного множества положений равновесия. Естественные уравнения равновесия нити на поверхности. Ось стержня была первоначально дугой окружности. одинаковыми и прямо противоположными силами 200 154. Стержень, изгибаемый действующим в одной плоскости постоянным нормальным давлением. скоростей. Связи допускают поступательное перемещение системы параллельно оси. Связи допускают вращение системы вокруг оси.
Смотрите также:
Предмет теоретическая механика
| Различные категории векторов | Положительное направление вращения вокруг оси |
| Три координаты свободного вектора | Векторное произведение двух векторов |
