
Оглавление:


Физический маятник
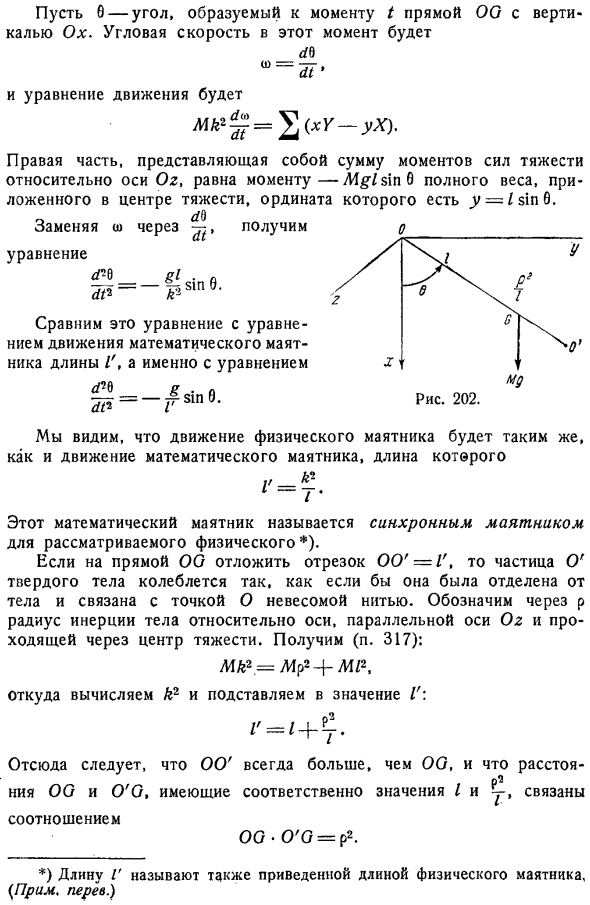
- Физический маятник это тяжелое твердое тело массой M, которое может вращаться вокруг неподвижной горизонтальной оси. Для оси z возьмем ось подвеса, на которой тело может вращаться, для плоскости xy возьмем вертикальную плоскость, содержащую окружность, описываемую центроидом O, а для оси O нисходящую вертикаль рис.202. Угол, образованный временем t вертикальной оси Ox и прямой линии OG, принимается равным 0. Угловая скорость этого момента dt. Уравнение движения дБ ДЖП. Правая сторона, которая является суммой гравитационных моментов для оси Og, равна моменту, mgzsino от общего веса, приложенного к центру тяжести, а вертикальная ось равна y = L sin 6. замена Вт. Уравнение 0 dt. Маятник то же.
Сравните это уравнение с уравнением движения математического маятника длины Z, то есть уравнением. =Суфиксом z sin9. Мы видим физическое движение и движение математического маятника, длина которого равна L = к. Мне. Этот математический маятник называется синхронным маятником рассматриваемой физической материи. Продолжая отрезок 00 = Z по прямой OG, частица o объекта отделяется от объекта и вибрирует, как будто соединена с точкой O невесомой нитью. Параллельно оси Oz, где радиус инерции тела к оси, проходящей через центр тяжести, обозначается п. 317 пункт 317. M 2 = Mp24 MZ2 Теперь мы вычисляем k2 и присваиваем ему значение Z.
Общий случай, когда теоремы проекций и моментов количеств движения дают первый интеграл. Людмила Фирмаль
Таким образом, 00 всегда больше, чем OG, и расстояние OG и O o имеют значения Z и p соответственно и связаны со следующими отношениями: 00 0 0 = p2. Длина также называется укороченной длиной физического маятника Примечание, transl. it это не так. Согласно Гюйгенсу, ось, проходящая через О параллельно оси подвески, получила название оси качания. Все точки этой оси колеблются, как бы отделенные от тела и соединенные с осью подвеса невесомой нитью. Предыдущая формула указывает, что ось качания и ось подвеса взаимно обратимы, поэтому при подвешивании тела на оси качания предыдущая ось подвеса становится осью качания. Теорема Гюйгенса.
Если 2 параллельные оси с одинаковой длиной синхронного математического маятника проведут неравные расстояния по обе стороны плоскости, проходящей через центр тяжести, то эти длины будут точно равны расстоянию между обеими осями. Фактически, если Z и Zt это расстояние от центроида до двух осей через O и Ox, а I общая длина синхронного маятника Сравнивая эти 2 эквивалентности, вы можете увидеть следующее: Оттуда, если вы выбросите решение = = x, вы получите Таким образом, расстояние между осями Z f фактически равно Длина Синхронный маятник.1 ось. Другой ось качания. Обратный маятник катера, используемый в опросе, основан на этом принципе.
Этот маятник представляет собой вращающееся тело, образованное 2 плоскими цилиндрами, Соединенными штоками. 2 Menounous ножа зафиксированы перпендикулярно к этой штанге и симметричны к своему центру.1. один из цилиндров полый, другой 1 заполнен свинцом, так что центр тяжести находится ближе к ножу другого, чем к одному из цилиндров. knives. By по теореме Гюйгенса, массу можно подбирать так, чтобы периоды колебаний вокруг обеих осей были одинаковыми, и этот общий период становится периодом колебаний математического маятника, длина которого равна расстоянию между кромками ножей.
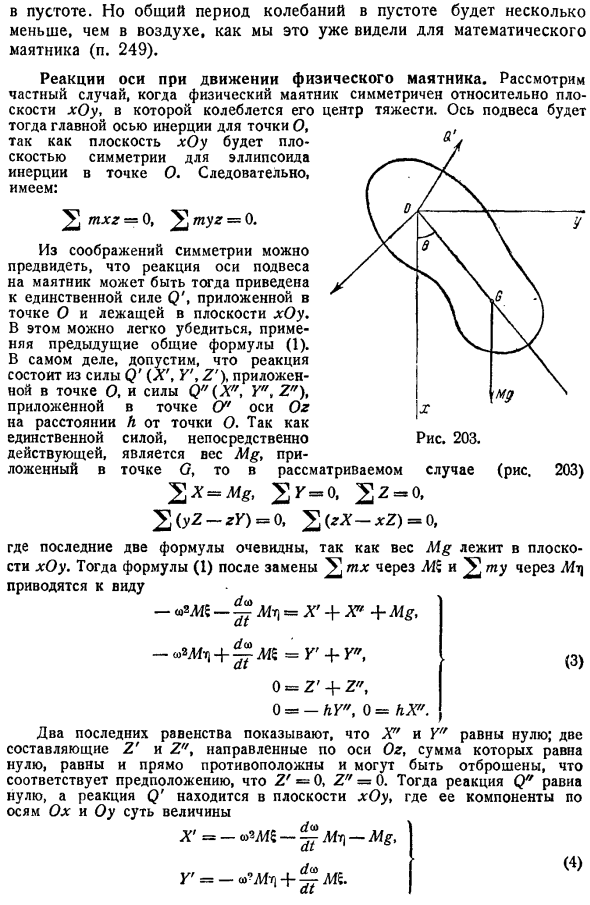
- Маятнику придают внешнюю форму, симметричную центру стержня, так что сопротивление воздуха одинаково, когда маятник колеблется вокруг обоих ножей. При этих условиях, когда период колебаний воздуха вокруг обоих ножей одинаков, когда они вибрируют в пустотах. Но общий период колебаний в пустотах вычисляется математическим маятником с. 249, который, как мы уже видели, несколько короче колебаний воздуха. Реакция оси при движении физического маятника. Рассмотрим частный случай, когда физический маятник симметричен относительно xOy plane. In в этом случае его центр тяжести колеблется.
Поскольку плоскость xOy является плоскостью симметрии эллипсоида точки O, ось подвеса является главной осью инерции точки O. Это выглядит так: В МХ = = 0, МУЗ В. Рассматривая симметрию, мы можем предсказать, что противодействие маятнику подвешенной оси сводится к одной силе Q в плоскости xOy, которая приложена в точке O. Это можно легко проверить, используя предыдущую общую формулу 1. фактически, предположим, что реакция состоит из силы Q, приложенной в точке O L , Y , Z и силы Q, приложенной на оси O X , Y , Z .Oz на расстоянии L от точки O. Рисунок 203. Дело рис. 203 Ноль Сила это вес Mg и приток G.
Движение относительно системы осей, совершающих прямолинейное и равномерное переносное движение. Людмила Фирмаль
Последние 2 формулы очевидны, так как вес Mg находится в плоскости xOy. Тогда формула после замены 2 mx на M и mu на LTC 1 имеет вид o2M = Х + Х + мг = р + 3 0 х = з + з О = хы, 0 = НХ. Последние 2 равенства это X Также можно использовать его в качестве автономного приложения. И Y равно нулю.2 компонента Z и Z вдоль оси Oz, сумма которых равна нулю, равны и могут быть отброшены прямо противоположно. Это соответствует предположению, что Z = 0, Z = 0.Тогда реакция Q равна нулю. И реакция Q находится в плоскости xOy, где компоненты вдоль осей Ox и Oy имеют размер.
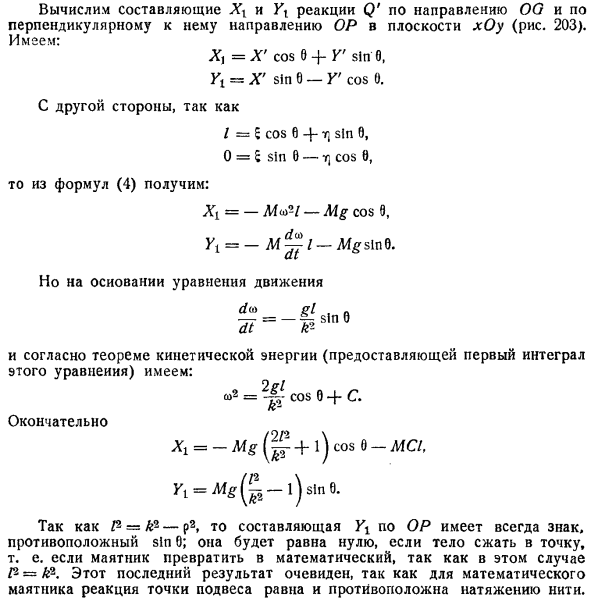
Вычислите компоненты реакций XR и Q re в направлении OG и направлении OP плоскости xOy, перпендикулярной ей рис. 203. Xi = Xcos O I Y sin 6 Ыть = х грех 0 й, потому что 0. С другой стороны Я = cos0 п р, грех 0 0 = 5 грех 0 7 кост Тогда получаем из Формулы 4. Х = Ми 21 9 мг, потому что У1 = JUgslnB. Но на основе уравнения движения И в соответствии с теоремой о кинетической энергии которая обеспечивает первый Интеграл этого уравнения м2= COS0 + C Наконец. Р:= мг + 1 cos0 МРП, г мг л ПД.
Так как P это k2 p2, то компонент Yi ОР всегда будет иметь противоположный знак sin 0.In в этом случае, поскольку P = k2, если тело сжато до точки, то есть маятник преобразован в математический, то он будет равен нулю. Этот последний результат является clear.
Смотрите также:
Теоретическая механика — задачи с решением и примерами
| Реакции оси | Исследование изменения длины синхронного математического маятника при перемещении оси подвеса заданного тела |
| Постоянные и свободные оси вращения | Машина Атвуда |
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.
