
Оглавление:


Естественный способ задания движения
- Естественный способ задать движение — установить траекторию и закон движения точек вдоль траектории. Расовое движение считается связанным с фиксированной системой отсчета. Траектория для выбранной системы отсчета задается различными способами: уравнениями (которые могут сопровождаться неравенствами), вербальным или графическим форматом (в любом масштабе).
Итак, энергия, которой обладает система, равна внешней работе, которую можно выполнить указанным выше способом, если ее энергия падает на состояние нуля. Людмила Фирмаль
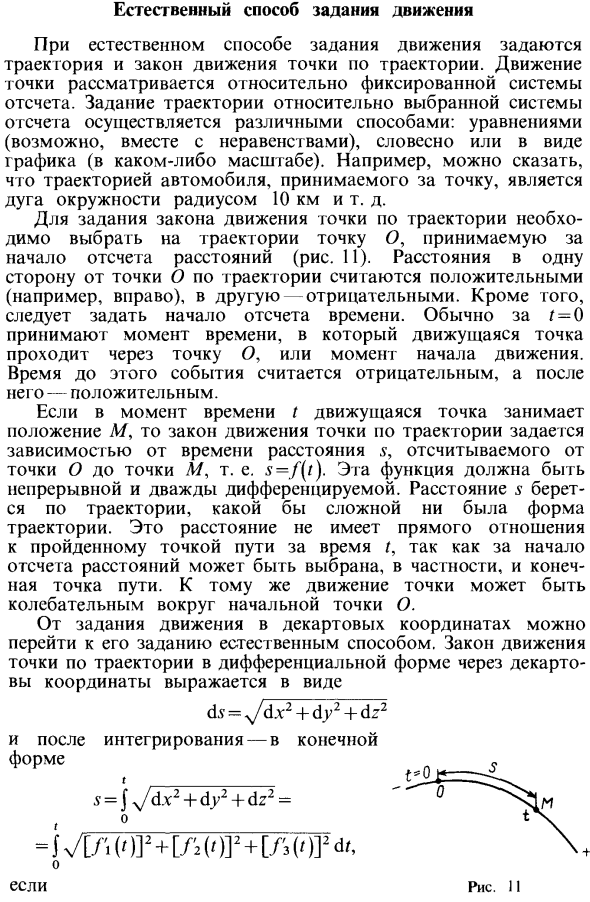
Например, траектория автомобиля, взятая за точку, можно назвать дугой окружности с радиусом 10 км. Чтобы установить закон движения точки вдоль траектории, вам нужно выбрать точку O на траектории в качестве начала расстояния (рисунок 11). Расстояние до одной стороны точки O вдоль пути считается положительным (например, справа) и отрицательным для другой. Кроме того, время начала должно быть установлено. Обычно, когда / = 0, берется время, когда движущаяся точка проходит точку О, или время, когда начинается движение.
- Время до этого события считается отрицательным, а после этого считается положительным. Если точка перемещения занимает положение Л / в некоторый момент времени t, закон движения точки вдоль траектории определяется временной зависимостью расстояния 5, отсчитываемого от точки О до точки Л /. То есть 5 = / (/). Эта функция должна быть непрерывной и дифференцируемой второго порядка. Расстояние s берется вдоль пути, независимо от того, насколько сложна форма пути.
Это расстояние не связано напрямую с расстоянием, пройденным точкой пути в течение времени t, особенно потому, что конечная точка пути может быть выбрана для отсчета расстояния. Кроме того, движение точки может колебаться вокруг начальной точки O. От задачи перемещения декартовой системы координат вы можете перейти к этой задаче естественным образом. Закон движения точки по дифференциальной траектории по декартовым координатам выражается как: d.v = ^ / dx2 4- dy2 + dz2.
Можно сказать, что инвариант таких подстановок относительно инвариантен в том смысле, что если каждый множитель умножить на определитель преобразования, то он становится множителем для новой системы переменных. Людмила Фирмаль
После интеграции-финальный формат Число f y / dx2 -I- dr2 + dz2 = = i LL (0) 2+ [Л (^)] 2+ [Л (‘)] 2 д /, о Рисунок 11 Когда x = fi (t), y = f2 (t \ z = f3 (t). Для контрольной точки расстояния была взята точка локуса, в которой в первый момент находилась движущаяся точка. Знак квадратного корня зависит от выбора положительного и отрицательного направления расстояния.
Смотрите также:
Задачи по теоретической механике
| Ускорение точки в декартовых координатах | Скорость точки при естественном способе задания движения |
| Естественный способ изучения движения | Геометрические понятия. Дифференцирование единичного вектора |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
