
Оглавление:



Естественный способ изучения движения
- Естественный способ настроить движение. Естественный способ задать движение — установить траекторию и закон движения точек вдоль траектории. Движение точки считается относительно фиксированной системы отсчета. Выбранная ссылка Траектория для ствола задается различными способами: уравнениями (которые могут сопровождаться неравенствами), словесными или типами трафика (в любом масштабе). Например, траектория автомобиля, взятая за точку, имеет радиус Можно сказать, что это дуга окружности, например, 10 км.
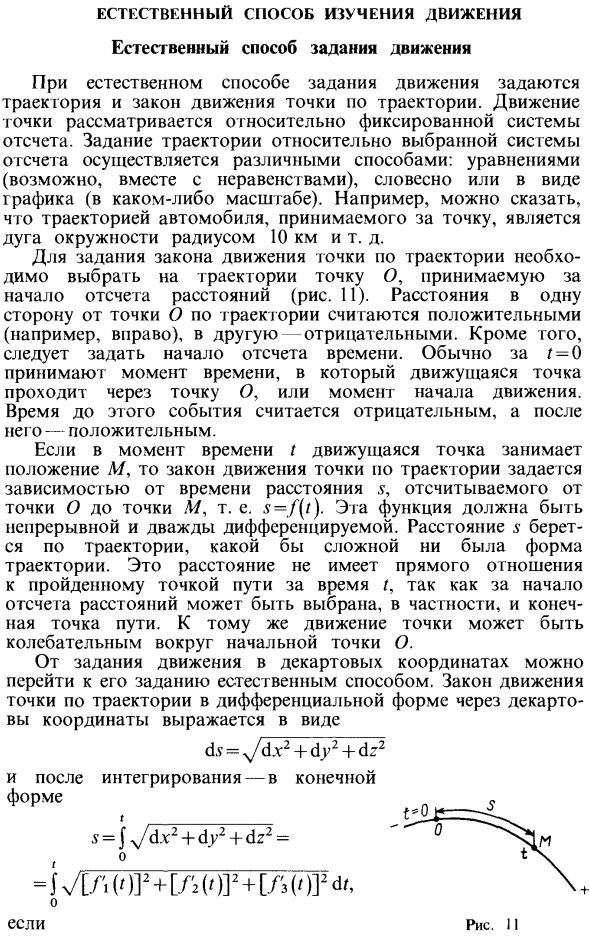
Чтобы установить закон движения точки вдоль траектории, вам нужно выбрать точку O на траектории в качестве начала расстояния (рисунок 11). Расстояние до одной стороны точки O вдоль пути положительное (например, Право) а другая сторона считается отрицательной. Кроме того, время начала должно быть установлено. Обычно 1 = Если 0, возьмите момент, когда движущаяся точка проходит точку O, или момент, когда движение начинается. Время до этого события считается отрицательным, а после этого считается положительным. Если точка / точка перемещения занимает позицию M, закон движения точки вдоль траектории является временной зависимостью расстояния s от точки O до точки M, то есть s = определяется по f (t).
Если точка визуализации первого момента находится в положении 1, то ее скорость изначально положительна, а расстояние исходной системы от положения равновесия равно расстоянию точки визуализации. Людмила Фирмаль
Эта функция должна быть непрерывной и дифференцируемой второго порядка. Расстояние s берется вдоль пути, независимо от того, насколько сложна форма пути. Это расстояние особенно Поскольку конечная точка пути может быть выбрана для привязки к расстоянию, она не имеет прямого отношения к расстоянию, пройденному точкой пути за время t. Кроме того, движение точки может колебаться вокруг начальной точки O. Я буду От задачи перемещения декартовой системы координат вы можете перейти к этой задаче естественным образом. Закон движения точки по дифференциальной траектории по декартовым координатам выражается как: ds = 4 / dx2 + dj> 2 + dz2 объединенная конечная форма s = f ^ / dx2 + d} ‘2 + dz2 = = mt2 + [»+ 1J.
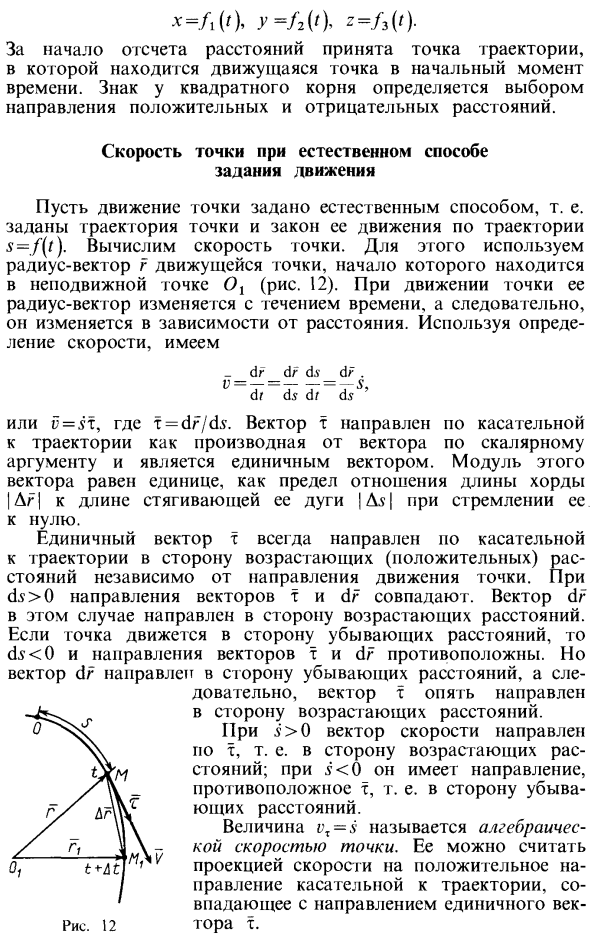
Если это 0, направления векторов m и dr совпадают. Вектор dr в этом случае направлен на увеличение расстояния. Если точка движется в сторону уменьшения расстояния, д.с. <0 и направления векторов m и dr противоположны. Но поскольку вектор dr направлен на уменьшение расстояния, вектор m снова направлен на увеличение расстояния. s> Когда 0, вектор скорости направлен вдоль m, то есть в направлении увеличения расстояния. Если s <0, направление противоположно m, то есть расстояние уменьшается. Количество вт = s называется точечной алгебраической скоростью. Это можно рассматривать как проекцию скорости в направлении касательной траектории, которая совпадает с направлением единичного вектора m. Рисунок 12.
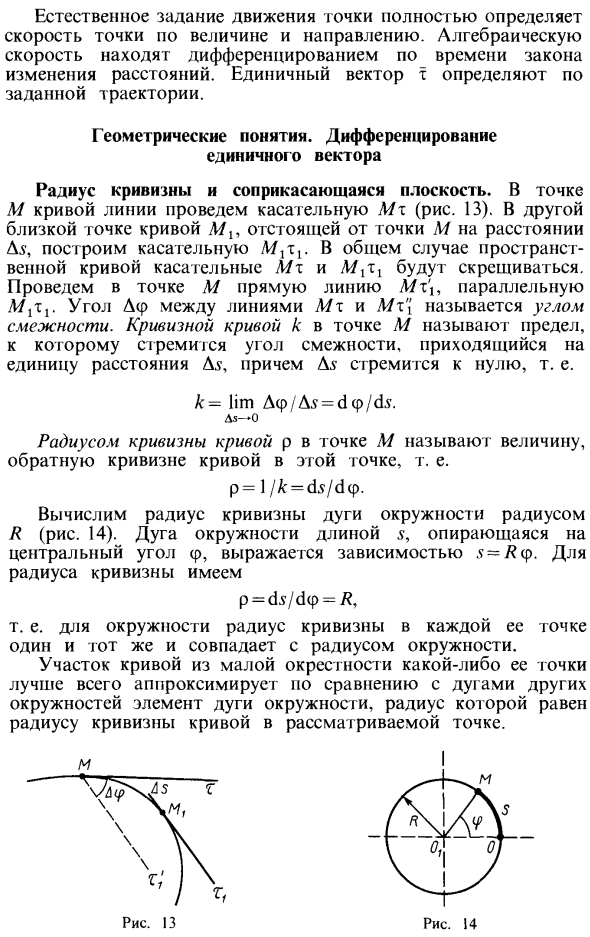
Естественная задача движения точки полностью определяет величину и направление скорости точки. Алгебраическая скорость получается путем дифференцирования закона изменения расстояния по времени. один Вектор положения m определяется заданной траекторией. Геометрическая концепция. Единичная векторная дифференциация Радиус кривизны и контактной поверхности. В точке M кривой касательная L / Нарисуйте t (рисунок 13). Построить касательную // ^ с другой ближайшей точкой /// Э на кривой от точки на на расстоянии As. В общем случае пространственных кривых, касательная L / м и мххх пересекаются. В точке M нарисуйте прямую линию L / m), параллельную A / jTj.
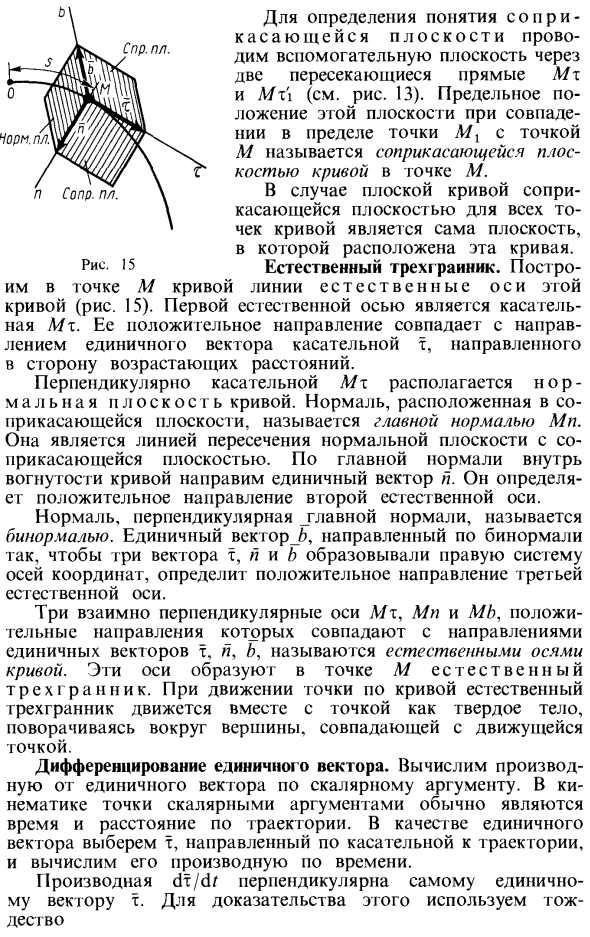
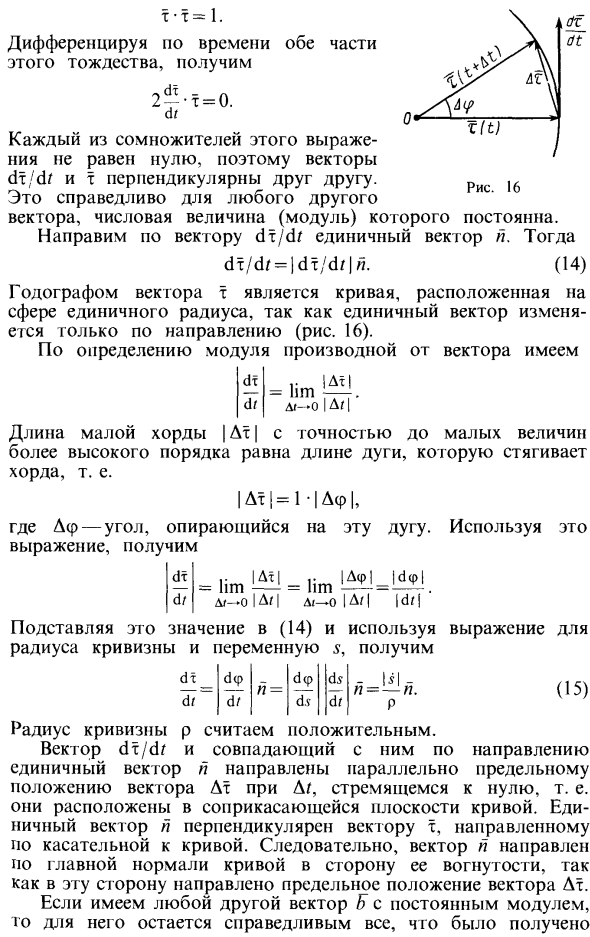
Радиус кривизны кривой p в / противоположен кривизне кривой в этой точке. p = l / fc = ds / d | | D / | | dr | Подставляя это значение в (14), используя уравнение радиуса кривизны и переменную s, получим «= 15!» = —Th (15) dr | dz I | di 11 dr I p » Радиус кривизны p считается положительным. Вектор дт / Единичный вектор n, который совпадает с dz и направлением, ориентирован параллельно ограничивающей позиции вектора Dm, где DW стремится к нулю. То есть они размещены в изогнутой плоскости контакта. Единичный вектор t h перпендикулярен вектору m, ориентированному по касательной кривой.
В результате предельное положение вектора Dm направлено в эту сторону, поэтому вектор d направлен на его вогнутую поверхность вдоль главной нормали кривой , Если существует другой вектор B с определенным модулем, все полученные значения действительны. Для единичных векторов только радиус годографа необходимо заменить на модуль b. Получите <15’1 dz 1 ^ ‘1, где n перпендикулярно вектору b и dfj / Единичный вектор, ориентированный параллельно dt. Уравнение (15 ‘) можно выразить как векторное произведение: dS / dt = 6ix5, Где r — вектор угловых скоростей вращения вектора 5, а его модуль равен | 3 [= | d .
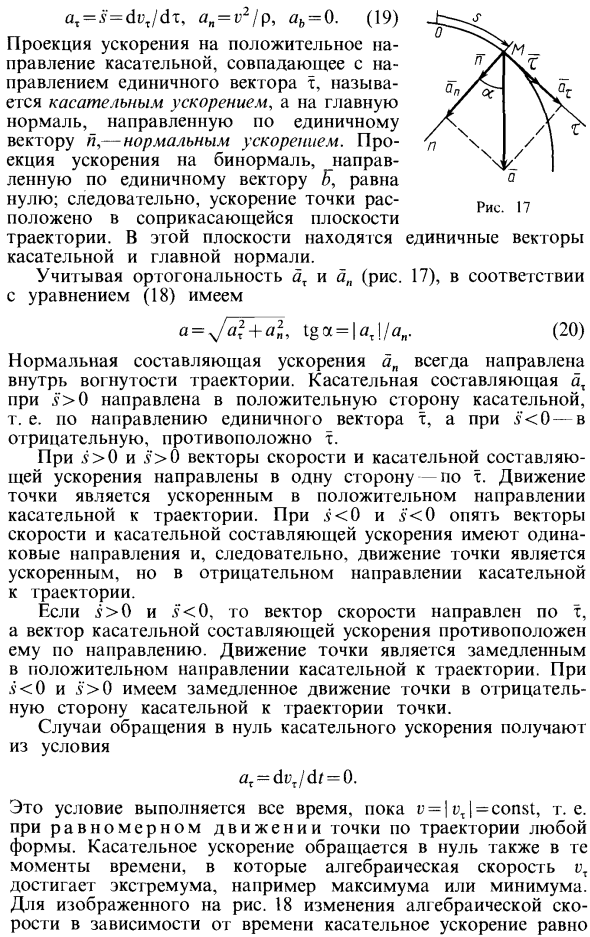
- Это называется нормальной составляющей ускорения. Он ориентирован внутри вогнутой поверхности траектории, то есть в положительном направлении единичного вектора основной нормали l. Это связано с тем, что полное ускорение направлено внутрь вогнутой поверхности орбиты. Потому что это так. Поэтому из точки ускорения (17) получаем формулу для проекции ускорения на естественную ось. Имеем: a, = s = dt »t / dt, a„ = tr / Pab = 0. (19).
Проекция ускорения в направлении касательной, которая совпадает с направлением единичного вектора m, называется тангенциальным ускорением и является нормальным ускорением ускорения на главной нормали, направленной вдоль единичного вектора. К единичному вектору B Проекция ускорения на бинормальную линию, направленную вдоль, равна нулю. Таким образом, точечное ускорение находится на контактной поверхности дорожки. Эта плоскость имеет единичные векторы для касательной и главной нормали. Я буду Учитывая ортогональность a и a (рис. 17), согласно уравнению (18) lg «. | A, | / a, (20).
Такая система отсчета представляет собой систему, которая движется поступательно вместе с центром масс материального объекта, который обычно находится приблизительно в невесомости относительно инерциальной системы отсчета. Людмила Фирмаль
Нормальная составляющая ускорения a всегда направлена внутрь вогнутой поверхности орбиты вы. 5> Касательная составляющая a, равная 0, направлена на положительную сторону касательной, то есть на направление единичного вектора m, и, если s <0, она направлена в отрицательное направление, противоположное t. 5> 0 и j ’> Если 0, вектор скорости и тангенциальная составляющая ускорения направлены в одну сторону вдоль точки.
Движение точки ускоряется в положительном направлении касательной к траектории. с <0 и с Если <0, направление касательной составляющей вектора скорости и ускорения одинаково, поэтому движение точки ускоряется, но в отрицательном направлении касательной к локусу. я> 0 и 5 Если <0, вектор скорости ориентирован вдоль m, а вектор тангенциальной составляющей ускорения противоположен направлению. Движение точки замедляется в положительном направлении, касательном к траектории. s Если <0 и s> 0, происходит медленное движение точки в отрицательном направлении, касательном к траектории точки.
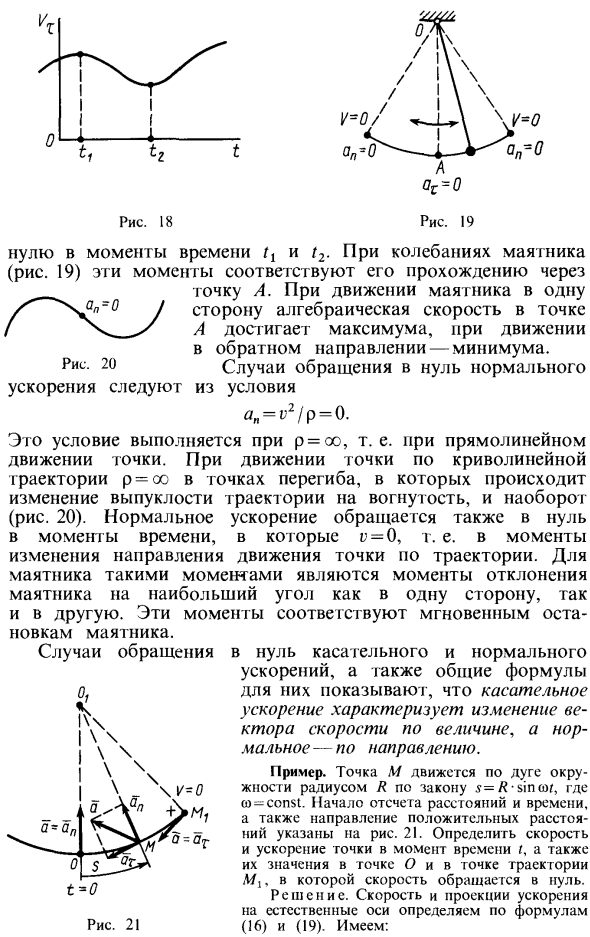
Если тангенциальное ускорение исчезает, оно берется из условия aT-dv, / dt = 0. Это условие всегда выполняется, но = | и | = const, т.е. когда точка движется равномерно по траектории любой формы. Касательное ускорение также исчезает, когда алгебраическая скорость v достигает предельного значения, например максимального или минимального значения. Показано на рисунке Изменение алгебраической скорости как функция 18 часов, тангенциальное ускорение равно Ноль в моменты времени r и t2. Во время вибрации маятника (рис. 19) эти моменты соответствуют прохождению через точку А. Когда маятник движется в одном направлении, алгебраическая скорость в точке A максимизируется и движется в противоположном направлении. Это будет минимальным при движении.
Для нормализации до нуля ускорение продолжается из условия 4, = ”2 / P = 0- Это условие равно p = заполнены oO. Другими словами, это линейное движение точек. Когда точка движется по кривой траектории, р = оо и наоборот (рисунок 20). Нормальное ускорение и = Он исчезает даже в момент времени 0, то есть когда направление точки движется вдоль траектории. В случае маятника такой момент является моментом вылета Маятник под максимальным углом как в одном направлении, так и в другом. Эти моменты соответствуют моментам, новым для маятника. Погрузочно-разгрузочный ящик t * 0 Рис. 21.
Тангенциальное ускорение и нормальное ускорение ноль и их общая формула указывают, что тангенциальное ускорение характеризует изменение величины вектора скорости и изменение направления нормали. Пример. Точка движется по дуге окружности радиуса R по закону s = R-sinωr (где ω = const). Начните считать расстояние и время. Направление положительного расстояния также показано на рисунке. 21. Определение скорости Ускорение в момент времени I, а также значения M и скорость в точке O и точке орбиты исчезают. Решения. Проекция скорости и ускорения на естественную ось определяется уравнениями (16) и (19).
Мы имеем: i /, = i = R f, a, = s = -Яш2sinш /; a „~ v2 / p = R2u> 2 cos2 a> l / R = Ra> cosa> Это видно в этом примере, где скорость исчезает в момент r1 = π / (2ш), когда f = 0. /, = Π / (2ш), то есть в момент изменения направления точки ,, = -H2, a, = 0. Получить выражения a и a для «», значения <= 0, 1, == Яш. а = 0. a „= R , = i> 0 + a, z, (21) Когда t = 0 v, = v0. i>, = ds / dt, поэтому примите во внимание (21) ds = t> odt + a, tdt, fds = uofdz + s = 0, если atJtdt, t = 0. Когда вы запускаете интеграцию, вы получаете s = vot + a ^. (22) Если (21) и (22) известны три другие величины, содержащиеся в этих уравнениях, то могут быть определены две неизвестные величины. ф
Смотрите также:
Задачи по теоретической механике
| Уравнение годографа вектора скорости | Естественный способ задания движения |
| Ускорение точки в декартовых координатах | Скорость точки при естественном способе задания движения |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
