
Оглавление:



Движение гироскопа под действием силы тяжести
- Пренебрегая сопротивлением среды, в которую движется гироскоп, и силой трения неподвижной точки или опоры рамы, соответственно, в дополнение к силе реакции неподвижной точки, гироскоп всегда имеет гравитацию. В этом случае гироскоп, к которому присоединена система координат Oxyz (ось Oz является осью симметрии гироскопа), перемещается относительно системы координат Oxlylzl. В системе координат Oxltl ось Озта с единичным вектором направлена вертикально вверх (рис. 141). P = PRI для силы тяжести P вертикально вниз, то есть в положительном направлении оси Озта.
Проекция на подвижную ось координат, зафиксированную гироскопом, выражается в следующем формате. P, Psob (s, l,) = Pu,; 1 P, PC1 r, Y) .. RU2. Я (3 ) P: = Pcos (: l =) = Py,. Где Yi, Yy Uz косинус угла между осью Оза и системой координат движущейся системы Oxyz. Основной момент L ^ 1 внешней силы относительно неподвижной точки уменьшается только до момента векторной гравитации вокруг этой точки. Так что, если xc = 0, yn = 0, zc = l, то с помощью (31) = : CP, P1hR. 1 i ;; M, (P) zcP, cP , r1.P, = P (J1 ; ( 32 P1 M. (P) USR, LR. 0. Динамическое уравнение Эйлера симметричного гироскопа (JX = J), движущееся под действием силы тяжести, принимает вид: = P1.
Применение метода поэтапного интегрирования к задачам на вынужденные колебания оказывается более сложным по сравнению с применением к соответствующим задачам на свободные колебания. Людмила Фирмаль
Динамические уравнения должны сочетаться с уравнениями движения Эйлера cox = sin 0 sin p + 6 cos q ; aeu = cos 0 cos p 6 sin p; (34) coI = ^ cos0 + q . В систему уравнений (33) и (34) нам нужно добавить уравнение (18), которое представляет косинус углов y2 и y3 относительно углов Эйлера. Yj = sin 0 sin p; y2 = sin 0 cos q ; y3 = cos0. (35) Интегрируем систему уравнений (33) и (34) с учетом (35) в наиболее важном частном случае начальных условий. 1 = 0; wx = a, = 0; o2 = oo; p = f = 0; 0 = 0O (36) Рекомендуется использовать первый интеграл этих уравнений вместо динамических уравнений Эйлера (33). Эти интегралы могут быть получены из самих уравнений или из теорем общей механики, примененных к гироскопам.
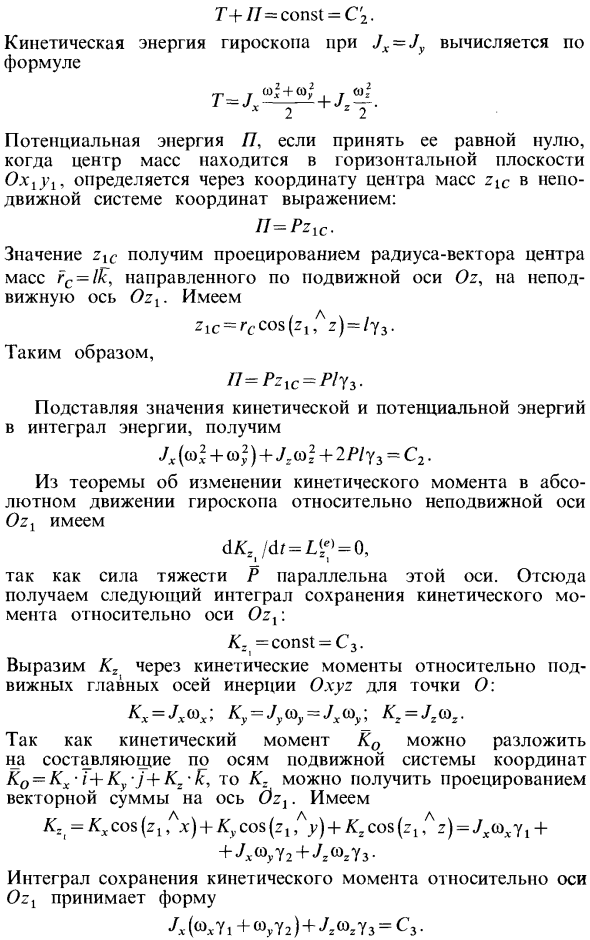
Один из этих интегралов выводится из последнего уравнения (33) системы. O. = const = C,. Примените общую теорему динамики, чтобы получить два других первых интеграла. Фиксированное соединение гироскопа является идеальным и фиксированным, если в неподвижной точке нет трения. Гравитация, действующая на это, является потенциальной. В этих условиях действует закон сохранения механической энергии (интеграция энергии) Рисунок 141 Кинетическая энергия гироскопа при Jx = Jy равна Если потенциальная энергия P равна нулю, когда центр масс находится в горизонтальной плоскости Ox1y1, она определяется через координату центра масс zic в фиксированной системе координат как P = Pr1C.
Значение zic получается путем проецирования радиус вектора центра масс rc = llc, ориентированного вдоль движущейся оси Oz, на неподвижную ось Ozf. zlc = rccos (z1, Az) = y3. Вот так Z7 = Pzlc = P T3. Подставляя значения кинетической энергии и потенциальной энергии в интеграл энергии, Z, ( J + coJ) + Jz z + 2P y3 = C2. Из теоремы об изменении момента движения при абсолютном движении гироскопа относительно неподвижной оси Oz dKz dt = L ^ = 0, Это потому, что сила тяжести P параллельна этой оси. Отсюда получаем следующий интеграл сохранения момента движения вокруг оси Озта. K. = const = C3. Выражаем Kr через момент движения главной оси Oxyz в точке O. Kx = Jx ox; Ky = Jyay = Jx ay; Kx = Jx ox.
Поскольку импульс Ko можно разложить на составляющие вдоль оси движущейся системы координат Ko = Kx i + Ky J + Kr I, K. можно получить, проецируя векторную сумму на ось Озта. У нас есть K. = Kxcos (zt, x) + Kucos (z ,, Lu) + Krcos (zt ^ z) = Jxatxyl ++ xgod2 + rc ) 1y3. Сохраняющий момент интеграл по оси Ozx принимает вид Вы получаете первые три интеграла динамического уравнения Эйлера: coz = Ci; (Co + co ) ++ 2P y3 = C2; L (71 + Y1 Shu) + L b ar = C3. При заданных начальных условиях c0 = w0 и t = 0 из этих первых интегралов получаются следующие уравнения для определения констант Clt C2 и C3 в соответствии с юх = o ,. = 0: (Oo = Q; JzO o + 2Ply30 = C2; Jz f3o (0o = С3 Подставляя эти постоянные значения в первое интегральное уравнение, o2 = sho; (37) Jx ( Ox + 2) = 2P (cos0o cos0); (38) Jx (Y1 х + 7 г) = Л (cos0О cos 0).
- Согласно (35) и начальным условиям, Uzo Y3 = cos COS0. Рассматривая уравнения движения Эйлера (34) (35), получим co2 + o2 = 25т20 + H2; (40) Yi1x + Y2co) = 4 х 20. (41) С учетом (40) и (41) уравнения (38) и (39) принимают следующий вид: Jx ( 2sin2 0 + О2) = 2Р1 (cos0О cos 0); (42) Jxt sin20 = Jz oo (cos0o cos ). (43) Из последнего уравнения системы (34), принимая (o2 = ω0, (Oo = cos0 + стр. (44) Получены системы нелинейных обыкновенных дифференциальных уравнений (42), (43) и (44), и их интегрирование может определять углы Эйлера , 0, p как функцию времени при заданных начальных условиях. вы. Это сложная система уравнений для интеграции.
Подготовьтесь к приблизительной интеграции. В (42) левая сторона положительна. Следовательно, правая часть также должна быть положительной (cos0o cos0 O). Имея это в виду, из (43) Ф = 7 ^ в (СО80 ° cos0) О, (45) То есть прецессия гироскопа с угловой скоростью прецессии всегда происходит в одном и том же направлении. Это связано с тем, что при 0 угол увеличивается со временем. Использование (45) для определения угловой скорости главы b из (42) Ф2 = у (cos0О + cos 9) (cos0О cos 0) 2 = = ^ (Cos0o cos 0) ^ 1 Поскольку левая часть (46) положительна, правая часть также должна быть положительной.
Точка пересечения К линии действия ударного импульса с плоскостью, проходящей через ось вращения и центр масс при отсутствии ударных реакций в подшипниках, называется центром удара. Людмила Фирмаль
Если cos0o cos0 O, вы можете видеть, что выражение в квадратных скобках также должно быть положительным. ^ L (cos0o cos0) l. (47) 2P J, sin2e o Для быстро вращающегося гироскопа, где собственный момент движения Jz oo достаточно велик по сравнению с максимумом знаменателя 2PIJX в (47), чтобы создать предварительное условие для последующих предположений в приближенной теории гироскопа Затем выполните приближенное интегрирование углов Эйлера полученного уравнения. Этот случай является наиболее практичным вопросом.
Для такого гироскопа разница между cos0o cos0 следующая из (47): В этом случае разность углов 0 0 ° = u также уменьшается. Где u изменение угла главы гироскопа. В этом случае вы можете получить приблизительное значение, отбрасывая заказы в течение небольших секунд. cosm = 1; sinu = ; cos0 = cos (0o + m) = cos0o usin0o; sin0 = sin0o. Учитывая, что 6 = d0 dz = дМ д , (46) дает дифференциальное уравнение для определения: (Du dz) 2 = a2zz (p tz), (46 ) Где введено постоянное обозначение a2 = J2cogjj ; p = 2PIJX sin0O (J2 cog). Из (46 ) извлеките квадратный корень и разделите переменные, затем получите Пределы интеграции устанавливаются с использованием начальных условий.
Интеграл слева рассчитывается с использованием Перестановка w = Psin2 ^. Когда вы запускаете интеграцию, наконец, (48) Подставляя значение 9 из (48) в (45) и принимая во внимание принятые допущения, 45 Отсюда интеграл угол прецессии . Для соответствующей угловой скорости вращения из (44), учитывая принятое предположение (45 ), W 0 Z, sin0o Из этого отношения квадратурным методом получается зависящий от времени угол p. Даже без вычисления интеграла уже можно сделать следующие основные выводы о быстро вращающемся движении гироскопа. 1.
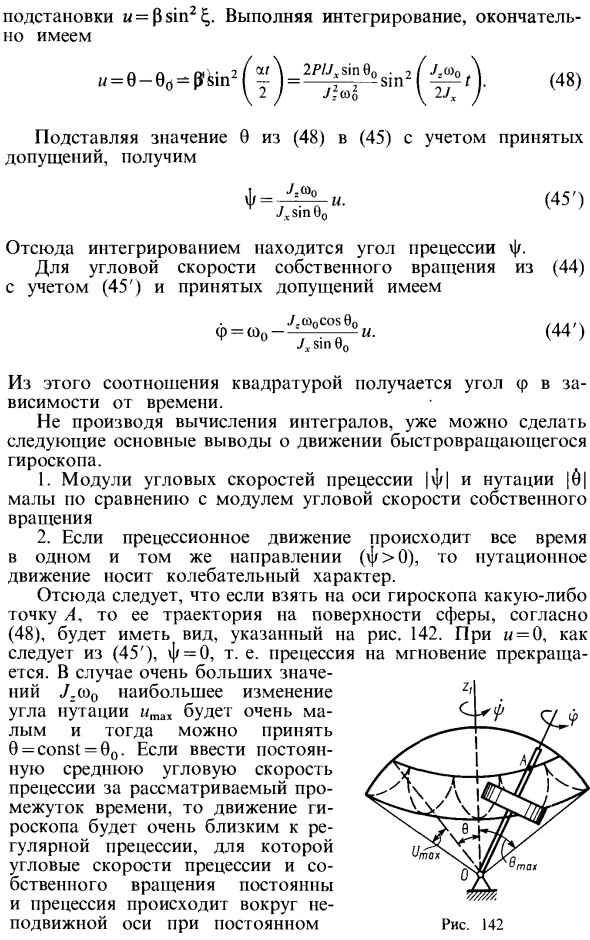
Модуль угловой скорости прецессии f и перемещение главы 6 Меньше, чем собственный модуль угловой скорости вращения 2. Если прецессия всегда происходит в одном и том же направлении ( 0), нутация по сути является вибрацией. Получив точку А на оси гироскопа, согласно (48) траектория на поверхности сферы будет иметь вид, показанный (45 ), = 0, т.е. из прецессии: , Если значение Lcoo очень велико, максимальное изменение угла главы ита очень мало и может принять 9 = const = 0o.
Вводя постоянную среднюю угловую скорость прецессии в течение рассматриваемого периода, гироскоп очень близок к нормальной прецессии, угловая скорость прецессии и собственное вращение постоянны, а прецессия постоянна. Постоянно происходит вокруг оси Рисунок 142. На время и = 0 Рис. 142 Угол движения главы. На самом деле движение гироскопа немного отличается от обычной прецессии. Гироскопическое движение вблизи регулярной прецессии называется квазирегулярной прецессией.
Смотрите также:
Задачи по теоретической механике
| Задача о вращении твердого тела вокруг неподвижной точки. Случаи интегрируемости | Приближенная теория гироскопа |
| Астатический гироскоп | Основные допущения приближенной теории |
