
Оглавление:


Динамические реакции при вращении твердого тела вокруг неподвижной оси
- Формула реакции. Твердое тело с двумя неподвижными точками A и B вращается вокруг неподвижной оси Oz, которая проходит через эти точки под действием приложенных извне сил F2, …, FN (рис. 86). После освобождения тела от комбинации точек A и B сила реакции комбинированных RA и RB прикладывается к телу. Проекции на оси обозначены XA, YA, ZA и XB, YB, ZB соответственно. Эти силы также являются внешними силами организма. Приложите силы инерции к точкам тела и примените систему принципов Даламбера к телу системы.
Предположим, что тело разделено на N частиц (маленьких), которые считаются точками. Для этого главный вектор и главный момент всех внешних и инерционных сил точки тела должны быть равны нулю. У нас есть E ^ k + ^ l + ^ c + φ = 0; _ G (20) Mo (Fk) + M0 (H, 4) + M0 (RB) + L Y »= 0. Чтобы определить силы реакции RA и RB из (20), необходимо выразить главный вектор Φ силы инерции и главный момент L’o ‘этих сил через характеристику самого объекта и его вращения. Для основного вектора силы инерции используйте ф = ^ Фк ^^ (-ткак) = -масса, (21) Где М вес ac — ускорение центра тяжести.
Найти положения равновесия тяжелой точки, которая движется без трения по винтовой линии на цилиндре вращения с вертикальной осью и притягивается одной из точек оси пропорционально расстоянию. Людмила Фирмаль
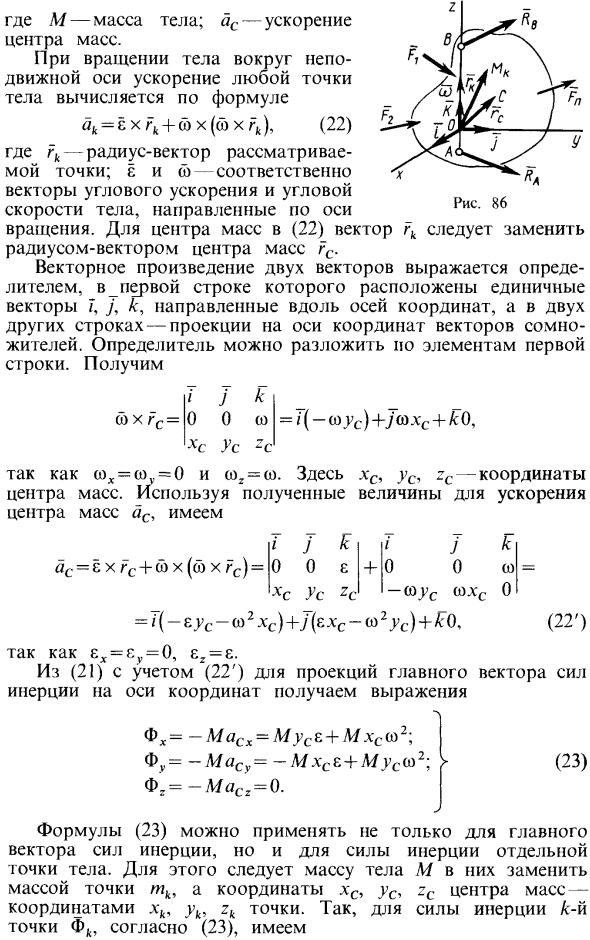
Если тело вращается вокруг фиксированной оси, ускорение в любой точке тела рассчитывается как a) [= yoh) [+ yh (yhhk), (22) Где rk — радиус-вектор рассматриваемой точки. e и d — векторы углового ускорения и угловой скорости тела, соответственно, вдоль оси. Вращение. Для центроида (22) вектор gk необходимо заменить на радиус-вектор центроида gc. Векторное произведение двух векторов представлено определителем, первая строка — это единичный вектор Γ, у, κ, ориентированный вдоль координатных осей, а две другие строки — проекции на координатные оси факторного вектора. Определитель может быть разложен на элементы в первом ряду. получить е 7 * я (Oohs = 0 0ω = «(- , = 0 и so1 = o). Где xc, yc и zc — координаты центра тяжести.
Используя полученное значение для ускорения центра тяжести переменного тока, | G J h lr / ‘I ac = Exhs + yx ( (23) Фг = -Л / аСг = 0. Уравнение (23) может быть применено не только к главному вектору сил инерции, но и к одной точке силы инерции на теле. Для этого их вес M заменяется массой точки mk, а координаты центра масс xc, yy, zc заменяются координатами точки xk, yk, zk. Следовательно, согласно силе инерции n-й точки nк, (23) ®kx = -fnkakx = mkyke + mkxk (23 ‘) Fkg = —tkakg = O. Проекция главного момента инерции для точек на оси вращения Lff ‘на оси координат рассчитывается по формуле для момента силы для этих осей.
Используя (23 ‘) и принимая ω и ξ после знака суммы, MF ’= A <φ) = | (zkФкх-хкФкг) = £ ДткУкzk + -BCO2 Y, mkxkzk = zJyz + a2 Jxz; L ™ = i №, -y & j = — ^ i ^ 2k + y2k) = — ^ r, где J „= £ mkxkzk, Jyi = £ mkykzk, Jz =, £ mk (xl + yl) — центробежная и осевая инерция Получает формулу для расчета проекции главного момента инерции Lffl на оси. З.! * ’= EJ„ — (o2Jyz; Li *} = zJyz + (o2Jxz; L ™ = -zJz. (24) При выводе уравнений (23) и (24) для проекции главных векторов и главных моментов инерции на координатные оси не было сделано никаких предположений об этих осях. Это либо фиксированные оси, в которых учитывается вращение объекта, либо подвижные оси, закрепленные на вращающемся теле.
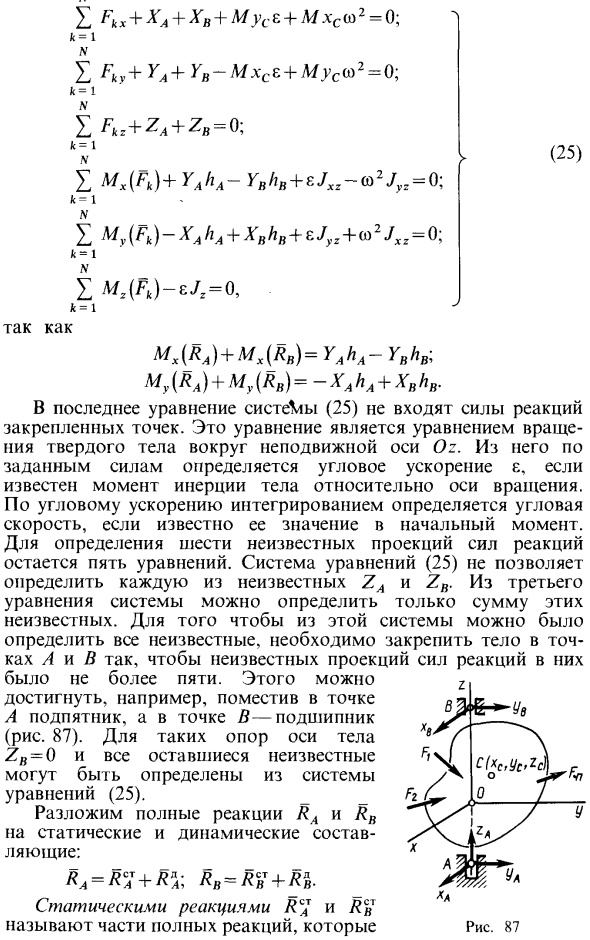
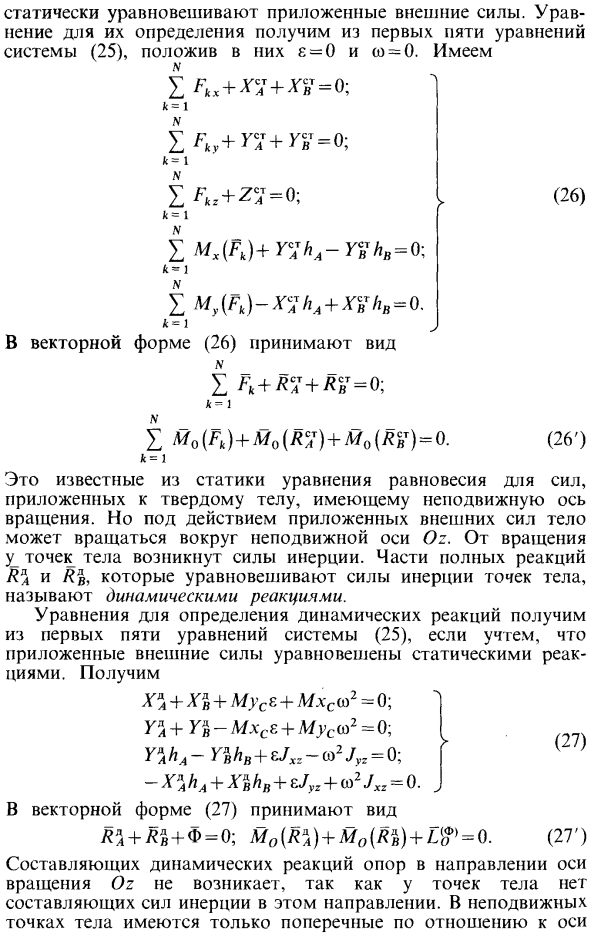
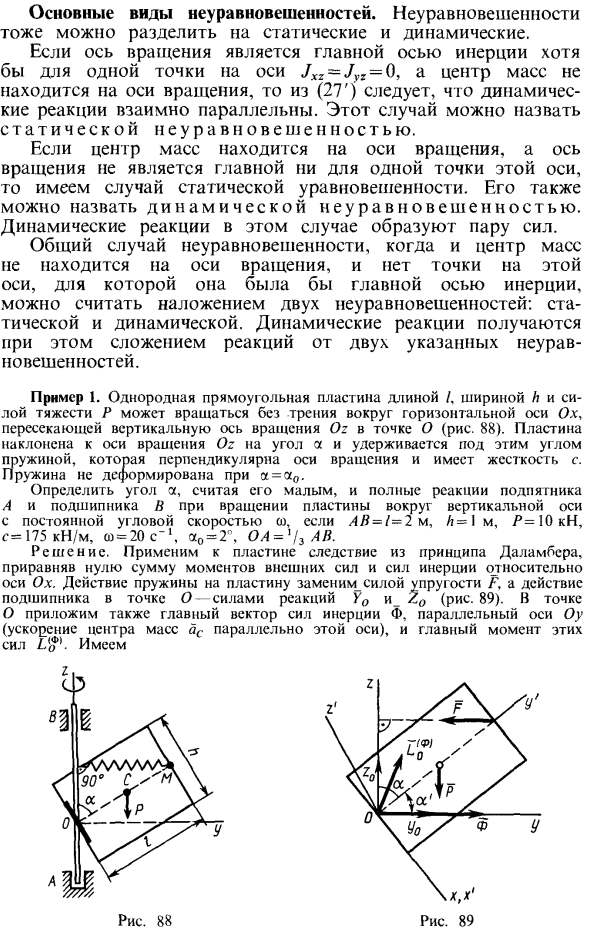
Поэтому эти формулы можно применять как к неподвижным осям, так и к осям, которые вращаются вместе с телом. Учитывая (23) и (24), из (20) проекции на оси координат получаем следующую систему уравнений для определения суммарной реакции Chl, YA, ZA и проекции Xb, YB, ZB , £ Fkx + XA + XB + M gC £ + M xc> 2 = 0; E Fky + YA + YB-Mxc £ + Mycm2 = 0; E Fkx + ZA + ZB = O; £ Mx (Fk) + YAhA- YBhB + £ jxx- r> Центробежный момент инерции J, глава 3). У нас есть Формула (35 ‘) (см. § (В) -Insrc момент инерции относительно главной оси Таким образом, это явление всех точек на этой оси. Ось Oz перпендикулярна пластине, а ее плоскость функционирует как плоскость симметрии. Такая ось также является главной осью инерции точки O в этой плоскости.
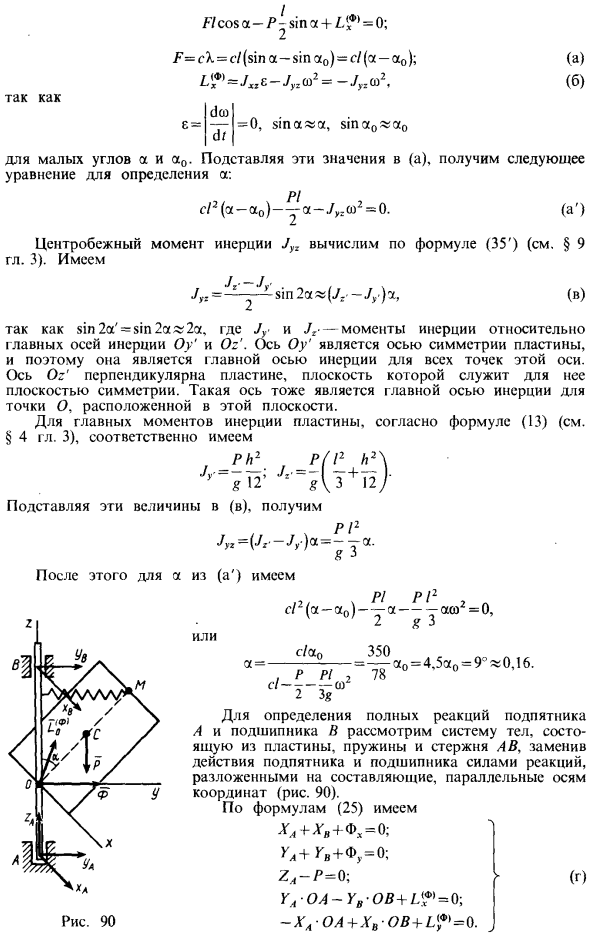
- Основной момент инерции пластины соответствует уравнению (13). Соответственно (см. § 4 гл.3) замена OL-Uv’OV + £. «- 0; -CHOLA + XY OV + Z.» * «= 0. (С) приобретать (А ‘) имеет s / cha-oh) — предопределенный B рассматривает коробчатую систему, состоящую из пластин, пружин и шатунов AB, и заменяет упорный подшипник и движение подшипника силой реакции, которая разлагается на компоненты, параллельные координатным осям (рис. 90). Из уравнения (25) Главная векторная проекция и главный момент инерции рассчитываются по уравнениям (23) и (24). Учитывая = 0, получим (D) £ ^ * = J „s + J„ a> 2 = -J Ось Ox перпендикулярна плоскости симметрии пластины, которая проходит через ОМ перпендикулярно плите.
Следовательно, J „= 0, потому что это главная инерционная ось точки O. Имея это в виду, мы получаем следующую систему уравнений из (d): X44-Xb = 0; гл р = о- U ^ OL-U, -OB-J «o>! = 0; -X ^ OA + Xc OB = 0. (G) Последний матч = -42,7 кН; Пример 2. Гомогенный круглый цилиндр под действием силы тяжести / * = 200 Н, радиус 8 = 20 см, длина / = 80 см, с постоянной угловой скоростью <о = 20с «‘вокруг вертикальной оси с помощью вала АВ (Рис. 91) Вращение касается поверхности цилиндра в центре образующей в точке О. Поэтому сегмент OS, соединяющий контакт и центр тяжести цилиндра, перпендикулярен оси вращения. Для 0,48 = 100 см, 04 = 60 см, чтобы определить динамическую реакцию подшипника A и B упорного подшипника, игнорирует массу вала АВ. Решения.
При расчленении системы тел надо следить, чтобы силы взаимодействия между телами или группами тел сочленной системы в точках сочленения были равны по модулю, но противоположны по направлению. Людмила Фирмаль
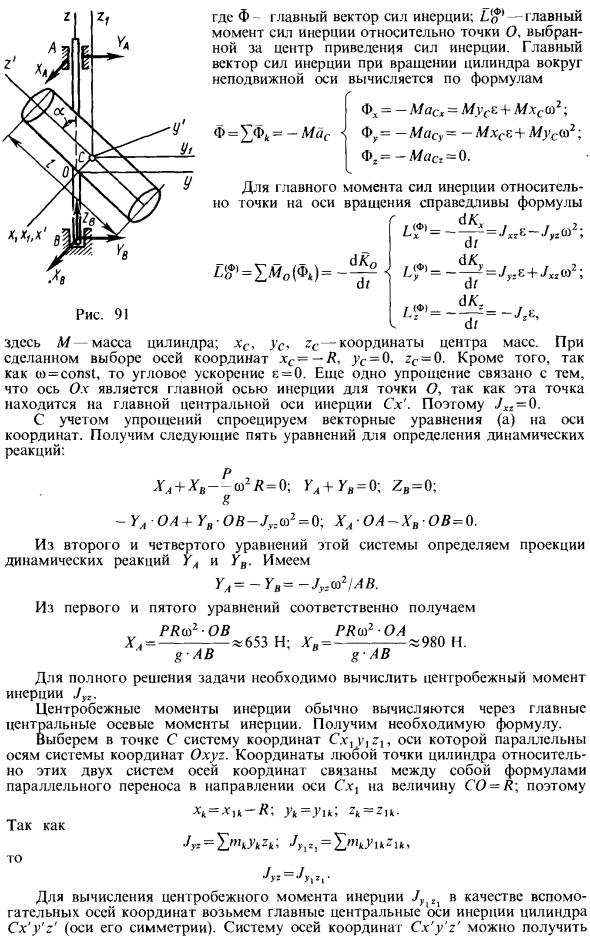
Выберите систему координат справа от координаты Охуга, зафиксированной в начале движущегося цилиндра, и укажите точку O. Ориентируйте ось Oz вдоль оси вращения. Ось Ox — вдоль линии, соединяющей точку O и центр тяжести C, ось Oy указывает перпендикулярно Ox и Oz. Динамический отклик формирует систему баланса сил с силой инерции системы. То есть они удовлетворяют условию силового равновесия. Где Φ — главный вектор силы инерции. Z.’®1 — основным моментом инерции для выбранной точки O является центр уменьшения инерции. Основная инерция при вращении вокруг цилиндра рассчитывается по формуле (Φ, = -Mas, = Muse + Mxc = const, тогда угловое ускорение.
Поскольку ka> выше главной центральной оси Cx инерции, ось Ox является главной осью инерции точки O. Поэтому векторное уравнение (координаты) проектируется с учетом J-упрощения. Получите следующие пять уравнений для определения динамического отклика: Chl + Xb-o> 2H-0; Ch + Y = 0: ZB = 0; г -OUL OA + Y, -OB-Jyl <o2 = 0, CHLOA-XB-OV = 0. Из второго и четвертого уравнений этой системы определяется прогноз динамического отклика hl и YB. У нас есть Yl = -YB = -Jy- ^ jAB. Получить РЯш2 ■ OBPR®2 ■ ОА из первого и пятого уравнений соответственно. Chl = ——— «653 N; X, = ——» 980N. G-AB G-AB Чтобы полностью решить задачу, нужно рассчитать центробежный момент инерции J ^.
Центробежный момент инерции обычно рассчитывается через основной момент инерции центральной оси. Получите выражение, которое вы хотите. Выберите систему координат с параллельными осями в точке C Ось системы координат Охуг. Координаты любой точки на цилиндре для этих двух систем координатных осей связаны значением CO = Z с формулой переноса в направлении оси C.x. И поэтому L = L, 1- Для расчета центробежного момента инерции в качестве вспомогательной координатной оси используется главная центральная ось цилиндра Cx’y’z ‘(его ось симметрии).
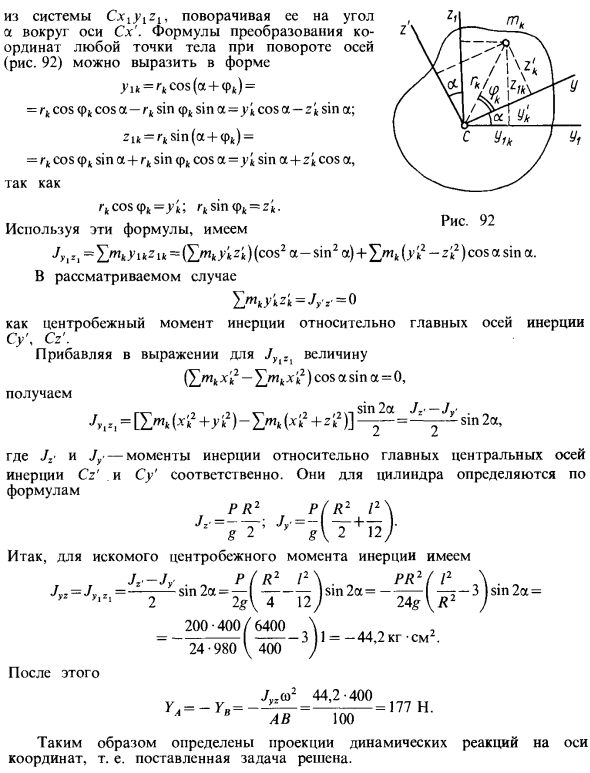
Вы можете получить систему координат Cx’y’z ‘ система И вокруг оси Cx ‘. Формула преобразует ординату любой точки на теле при повороте формы -GK COS <₽! Формула у нас есть L, значение Мы получаем Как центробежный момент инерции Su ‘, Cr’. добавленной Здесь, * Мул Центральная ось Цилиндр определяется □ Состояние на складе Т ‘ Желаемый центробежный момент инерции Осевая реакция Координаты, то есть проблема решена.
Смотрите также:
Задачи по теоретической механике
| Принцип Даламбера для системы материальных точек | Статическая уравновешенность |
| Силы инерции твердого тела в частных случаях его движения | Динамическая уравновешенность |
