
Оглавление:


Дифференциальные уравнения движения материальной точки
- Используя фундаментальные законы динамики, вы можете вывести дифференциальные уравнения для движения точек массы в различных системах координат. Используя аксиомы ограничений и силу связанных реакций, вы можете получить дифференциальные уравнения движения и несвободные точки так же, как свободные уравнения. Только сила объединенной реакции должна быть добавлена к каждой силе, приложенной к точке.
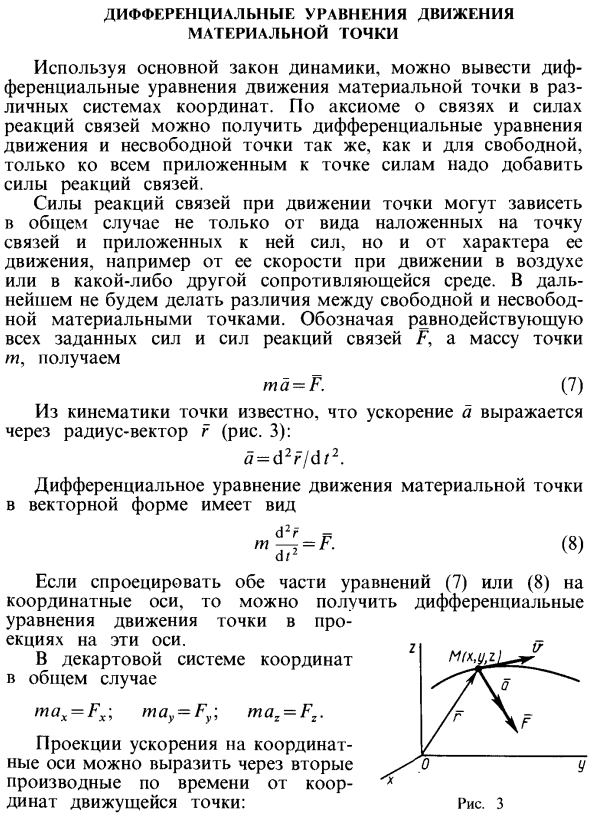
Сила реакции связи во время движения точки — это не только тип связи, приложенной к точке и приложенной к ней силы, но также характер движения, например, перемещение в воздухе или другой резистивной среде. Это также зависит от скорости, когда вы делаете. В будущем мы не будем различать свободные и несвободные материальные точки. Приведены результаты всех приведенных сил и объединенной силы реакции F, а также массы точки m, ма ^ F. (7) Из кинематики точек видно, что ускорение a выражается радиус-вектором g (рис. 3). a = d2r / dt2.
Регулятор представляет собой устройство, предназначенное для приведения изменений средней скорости машины, вызванных изменением движущей силы или силы сопротивления, как можно ближе друг к другу. Людмила Фирмаль
Форма дифференциального уравнения движения точки массы в векторной форме имеет вид Спроецируйте обе части уравнения (7) или (8) на оси координат, чтобы получить производную Уравнение движения точек в проекциях на эти оси. Декартова система координат для общего случая max-Fx; ma, -Fy; maz-fx. Проекция ускорения на оси координат может быть выражена как вторая производная по времени от координат движущейся точки. Рисунок 3 _d »r_d2T. _dt>. _d2z y df d / 2 ′ 1 dt d / 2 ‘ Дифференциальное уравнение движения массы в декартовой декартовой системе координат имеет вид улица Особый случай. Если вы знаете, что точка массы движется в одной плоскости, возьмите ее в координатную плоскость Оху, (U) Поскольку z = 0, значит, Fz = 0.
- Если точка движется по прямой и ориентирует оси Ox вдоль нее, вы получите одно дифференциальное уравнение для линейного движения точки. (А) Поскольку движение y = z = 0, то Fy = Fz = 0. Для естественной движущейся координатной оси (рисунок 4), которая проецирует обе части (7) на эти оси, вы получаете: maz = Ft; ma „= F„; mab = Fb, Где a, a „, ab и Fz, F„, Fb — это проекции ускорения и результирующей силы на касательную, основную нормаль и субнормаль траектории в рассматриваемом положении точки движения, соответственно.
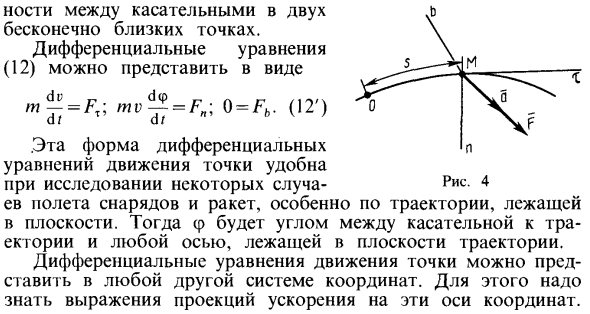
Учитывая, что az = d2s / dt2; a „= v2 / p; ab = 0, Где p — радиус кривизны траектории, а дифференциальное уравнение для движения спроецированной точки по естественной оси m- = F „; 0 = Fb. р Второе уравнение из (12) можно преобразовать. дс в2 в дс я дтп p = -: — = v-— v ——-— v ~, дтп п р дтдс / дтп дт Где d <p / d / — угловая скорость вращения касательной к траектории движущейся точки, поэтому dtp Между касательными в двух почти бесконечных точках. Дифференциальное уравнение (12) имеет вид M ^ -F, -. 0-F,. 112 ‘.
В свою очередь колебательное движение механической системы в целом имеет колебательный характер, то есть не все обобщенные координаты или некоторые из них изменяются монотонно. Людмила Фирмаль
Эта форма дифференциального уравнения движения точки полезна Некоторые тематические исследования — рисунок 4 В частности, снаряд и ракета летят по плоской орбите. Затем <p — угол между касательной к локусу и осью в плоскости локуса. Дифференциальные уравнения для точечного движения могут быть выражены в других системах координат. Для этого вам необходимо знать представление ускорения проекции на эти оси.
Смотрите также:
Задачи по теоретической механике
| Основные аксиомы классической механики | Две основные задачи динамики точки |
| Системы единиц | Основные виды прямолинейного движения точки |
Если вам потребуется помощь по теоретической механике вы всегда можете написать мне в whatsapp.
