
Оглавление:


Расчет простых статически неопределимых балок
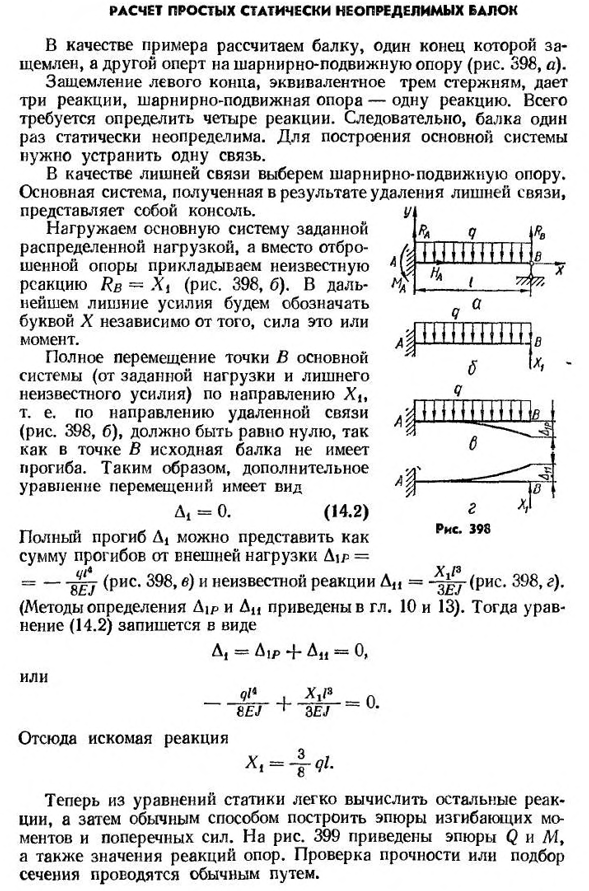
- Простые статические неопределимые балки расчет th9 — О! 7ZL * Семьдесят семь. В качестве примера рассчитаем балку с одним зажатым концом, другой конец которой опирается на шарнирную подвижную опору(рис. 398, а). Одна реакция-суставная опора, дающая три реакции, зажимающая левый конец, соответствующий трем стержням. Всего необходимо определить четыре реакции. Таким
образом, луч некогда статически неопределим. Строительство главной системы не требует никого. В качестве дополнительного соединения выберите шарнирную подвижную опору. Основной системой за счет удаления излишней связи является консоль. Загрузите основную систему с заданной распределительной нагрузкой и примените неизвестную реакцию
RB=вместо сброшенной опоры(рис. 398, б). В будущем, будь то сила или момент, Людмила Фирмаль
дополнительное усилие выражается в букве X. Основной системой в направлении XJt(от заданной нагрузки и избытка неизвестных сил) является полное перемещение точек, то есть направление удаленной связи (рисунок). В точке B отсутствует отклонение исходного луча, поэтому 398, b) должно быть равно нулю. Таким образом, дополнительное уравнение перемещения принимает вид At=0. (14.2)общее отклонение внешних нагрузок можно выразить как сумму отклонений от воздуха= = −4/(Ri C-398, b) и неизвестной
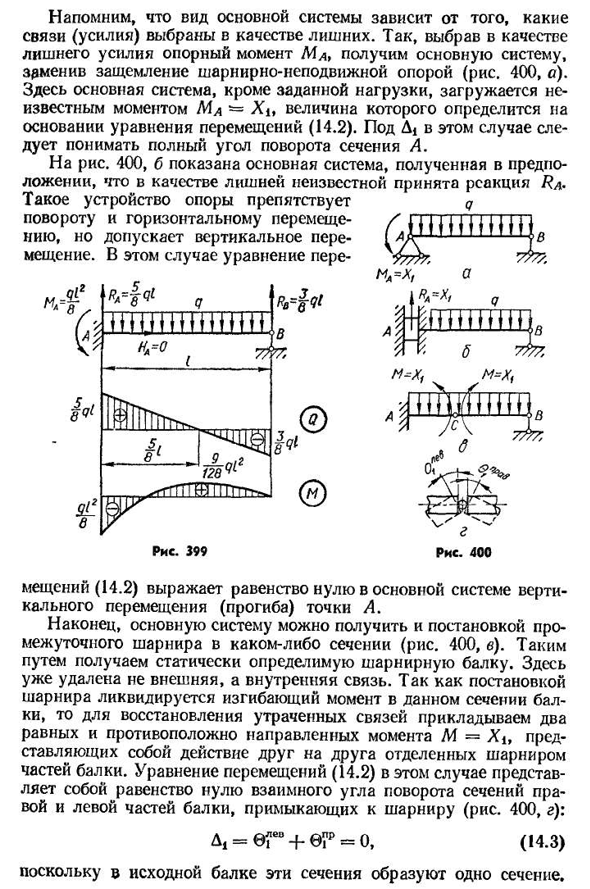
реакции DP=(Aip и AI) методом определения AIP и далее уравнение (10 и 13) записывается как A, — D1p An=0, (Рис. 398, г). Или КЛ*. Х il3A HEJ3EJ~ Следовательно, желаемая реакция *. =4^ Теперь легко рассчитать оставшиеся реакции из уравнений статики и построить график изгибающих моментов и боковых сил обычным способом. Для риса. 399 эпюры Q и М, а также значения опорной реакции. Подтверждение интенсивности или выбор участка осуществляется
- обычным способом. 397напомним, зависит от того, какая основная система, какие связи (усилия) была выбрана в качестве лишних. Итак, при выборе опорного момента MD в качестве дополнительного усилия мы заменяем зажим шарнира неподвижной опорой (рис. 400, а). Здесь основная система, помимо указанной нагрузки, нагружает неизвестный момент Ма-его величина определяется на основе уравнения перемещения (14.2). Под D1 в этом случае следует понимать суммарный угол поворота сечения L. Для риса. 400, б получается в предположении, что опорное устройство такое, что дополнительная неизвестная реакция приемлема для
предотвращения вращения и горизонтального перемещения, но для обеспечения возможности вертикального перемещения в этом случае необходимо повторно использовать уравнение. >111111111 мещениус (14.2) выражает эквивалентность нулю в базовой системе вертикального смещения (отклонения) точки D. Наконец, основную систему можно получить и при изготовлении промежуточных шарниров в любом поперечном сечении(рис. 400, в). Таким образом, мы получаем статически определимую шарнирную балку. Вот уже убрали внутреннюю ссылку, а не внешнюю. Поскольку установка шарнира исключает изгибающий момент этого участка
балки, уравнение перемещения (14.2) в данном случае равно нулю угла взаимного поворота участка левой и правой частей балки, Людмила Фирмаль
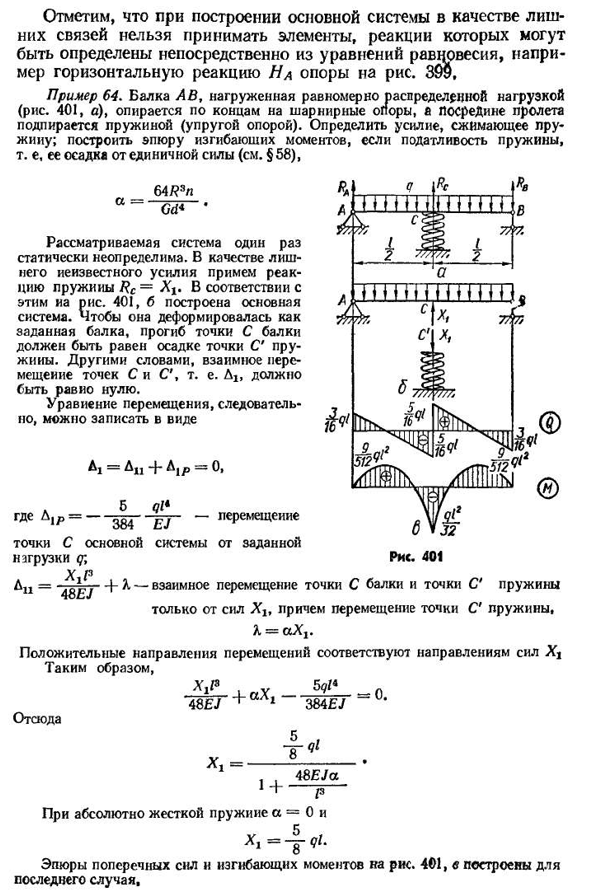
прилегающих к шарниру, с целью восстановления утраченного соединения (фиг. 400, г): (14.3) Для собственных балок эти секции формируются. >»8. заметим, что при построении основной системы нельзя брать элементы, которые можно определить непосредственно по формуле ее реакционного равновесия, как ненужное соединение трехсот девяноста девяти., Пример 64. Балка а-в нагружена равномерно распределенной нагрузкой(рис. 401, а) находится в конце на шарнирной опоре, а в центре пролета поддерживается пружина (упругая опора). Гибкость пружины, то есть ее отложение от единичной силы, определяется изгибающим моментом (см.§ 58), 64/?3л ГД* * Рассматриваемая система некогда статически неопределима. В качестве дополнительной неизвестной силы
возьмем реакцию пружины PS-x g. Согласно этому ИА фиг. 401 b построил основную систему. Для того чтобы она деформировалась как заданная балка, отклонение точки от балки должно быть равно наклону точки от пружины. Другими словами, взаимное смещение точек C и C’, т. е. L1? Она должна быть равна нулю. Опишите движение уравнения перемещения в Адж-ДП+ПДП-0, Где D_ _ _ _ B 1П~384EJ — Перемещение точки из основной системы с заданной нагрузкой.; +Л-Сила Х-взаимной передаче точек от лучей и от источников, и передачи очков из родников, х=а, из балок стамесок. Положительное направление смещения соответствует направлению силы xj, 1 8E G+A L1 384. — И так оно и есть. Пять. / Х1== ———- ———— • ,£ 48, ОКК 1-1р Абсолютно жесткая пружина а=0 и =4 Ци- Диаграмма поперечной силы и изгибающего момента на рисунке. 401 в последнем случае, главным образом,
Смотрите также:
| Концентрация напряжений при изгибе | Канонические уравнения метода сил |
| Дифференциальное уравнение изогнутой оси | Влияние высоких температур на механические свойства металлов. |
