
Оглавление:


Вычисление интегралов мора по способу верещагина
- Расчет Интеграла по методу Мора Верещагина Если один из графиков (фактические состояния или единицы измерения) является прямой линией, вычисление интеграла моля значительно упрощается. Это условие, поскольку участок от одной нагрузки (концентрации или пары) всегда ограничен прямой линией, всегда выполняется для
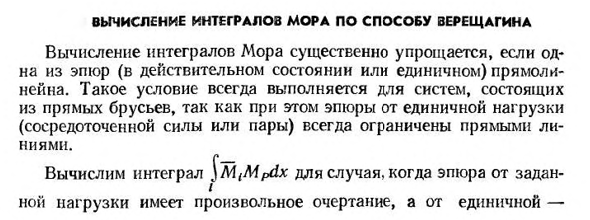
системы, состоящей из прямых стержней. Вычислите Интеграл^M (A4pdx), если график от заданной нагрузки имеет произвольную форму и от единиц измерения — 380-прямая (рис. 377). Представляет площадь участка M g\s-его центроид, MS-вертикальная ось участка от единичной нагрузки под центроидом участка Mr Mpdx=dQ-дифференциальная область участка Mr, L4<=x
Тогда полученный Интеграл f Mt Mpdx=tg a [ Я т Правый Интеграл уравнения Людмила Фирмаль
(13.59)представляет собой статический момент площади участка Mr для оси o-o: XdQ Дж. =х^г, / Где УГ-это абсцисса центра тяжести МР сюжет. В этом случае MtM Pdx = tg ahgy= = YL4G, (13.60) j Я Потому что… Таким образом, Интеграл Мора является свойством участка от внешней нагрузки в ординате линейного участка от единичной нагрузки, расположенной ниже центроида участка от заданной
внешней нагрузки. Общая формула перемещения для системы линейных элементов (13.46) имеет вид (13.61) Описывается графоаналитический метод вычисления интеграла Mora. II. It предложен Верещагиным и называется методом Верещагина. Расчет по этой формуле проводится на каждом участке, где участок от единичной загрузки должен быть линейным(рис. 378). Если оба участка прямые, вы можете умножить любую область на ординату
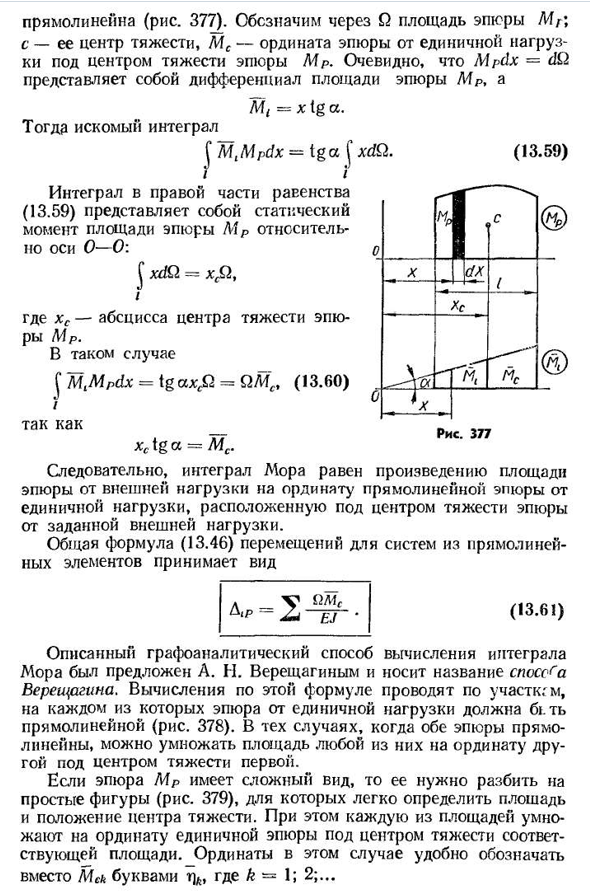
- другой под первым центроидом. Если участок M R имеет сложную форму, то его следует разбить на простые фигуры(рис. 379), ибо легче определить площадь и расположение центра тяжести. В этом случае каждая область умножается на ординату единичного участка, которая находится ниже центроида соответствующей области. В этом случае удобно указать вместо символа MEK G)L, k-1;2;… 3s1 следующим образом* (13.62) Рассматривая крутящий момент в общем случае нагрузки, знаменатель уравнения соответствующего члена (13.61) содержит жесткость на кручение GJ Если участок Mr противоположе
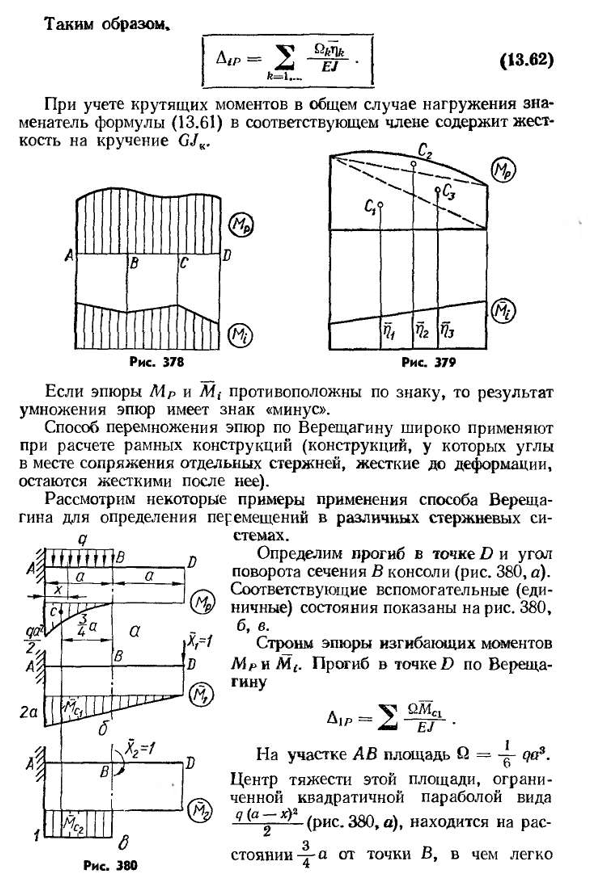
н знаку, то результат умножения участка имеет знак минус. Метод умножения участка Верещагина широко используется при расчете каркасной конструкции (угол на границе раздела отдельных стержней, жесткость до деформации, затем остается жесткой). В данной работе рассматривается применение метода Верещагина для определения перемещений в различных стержневых системах. Определите отклонение точки D и угол поворота сечения в консоли (рис. 380, а). Соответствующее вспомогательное (единичное) состояние показано на рисунке. 380, Б, В. Изгибающий момент в точке D по Верещагину строит диаграмму прогиба m pH m s Площадь участка равна(2=qa3.
Центр тяжести этой области окружен вторичной параболой вида (рис. 380, а) находится Людмила Фирмаль
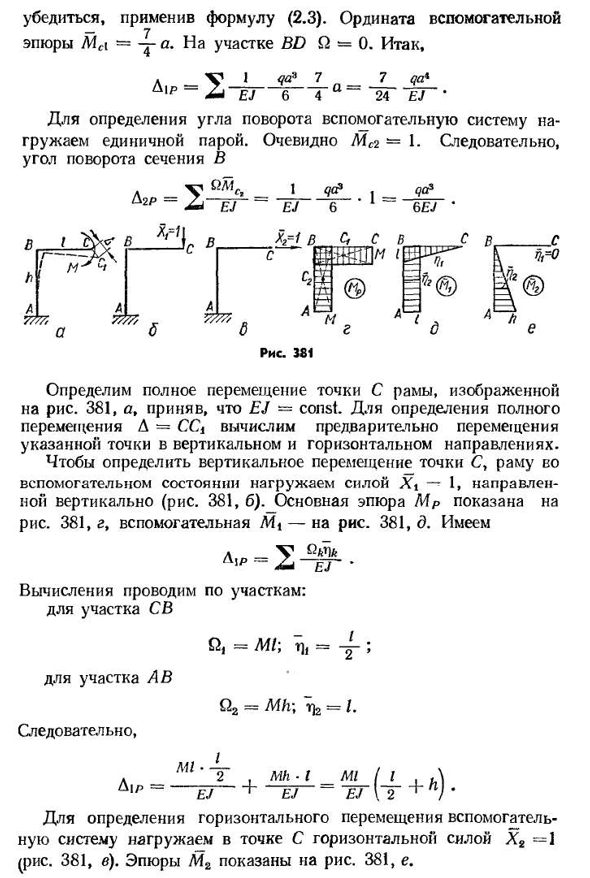
на расстоянии — ^ — от точки в, в чем легко убедиться, применив формулу (2.3). Вертикальная ось вспомогательного участка L4c1=a. BD Q=0 на сайте. Итак, qa * ~EG Для определения угла поворота вспомогательная система загружается одной парой. Очевидно, MS2-1. Следовательно, угол поворота секции л У1 2P-EJ~ ~ EJ6 ′ 1 ~ SEJ • Триста восемьдесят один рис Определим полное перемещение точек из кадра, показанного на рисунке. 381, и, предполагая EJ=const. A = вычислить вертикальное и горизонтальное смещения данной точки для определения полного смещения ПЗС. Для определения вертикального перемещения точки с Рама во вспомогательном состоянии нагружается силой x=1, направленной вертикально(рис. 381, б). Основной сюжет Mr показан на рисунке. 381, g, aux Mi-на фиг. 381, д.,
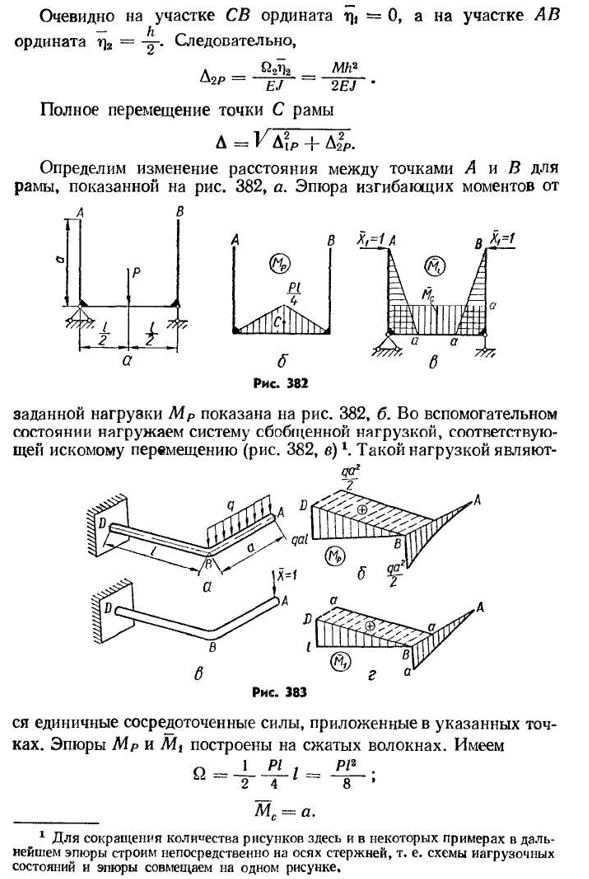
Расчет производится на сайте: SV site Й, = Т; ; Для управления АВ О2 = МХ\й=/. И так оно и есть., Для определения горизонтального перемещения вспомогательной системы горизонтальная сила x2=1(Рис. 381, в). Участок м2 показан на рисунке. 381, е. 383evidentally SV vertical on the site=0, а AV на сайте Vertical t) 2= » gr., Но __Mh2^2Р»~е~ ~ 2е Г’ Идеальное смещение пятна от рамки A=D(R+DGR Попробуем определить изменение расстояния между точками кадров, показанных на рисунке. 382, a. график изгиба a и B на мгновение из Данная нагрузка M P показана на рисунке. 382, b.
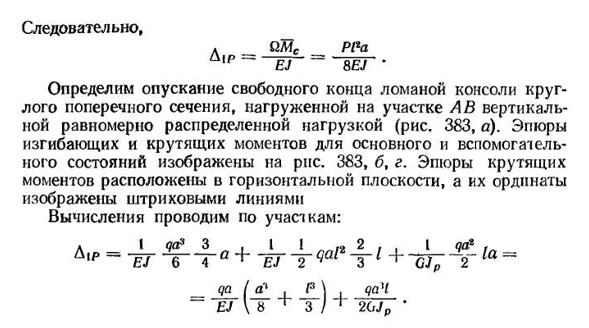
In вспомогательное состояние, нагружающее систему обобщенной нагрузкой, соответствующей требуемому перемещению (фиг. 382, Б) 1. Такие нагрузки бывают Это единственные силы концентрации, которые действуют в этих точках. Участки Mr и Mi были построены на сжатом волокне. Иметь ~2 4 1 ~ 8′ _________MS=а. Чтобы уменьшить число фигур 1, в некоторых будущих примерах участок строится непосредственно на оси стержня. 384 противоречия, Но L/R QMC RRA EJ8EJ — Определим падение сломанного консольного свободного конца круглого сечения, нагруженного в сечение АВ вертикальной равномерной распределенной нагрузкой(рис. 383, а).
Диаграммы изгиба и крутящего момента основного и вспомогательного состояний показаны на рисунке. 383, Б, г. График крутящего момента размещен на горизонтальной плоскости, его координаты представлены пунктирной линией.: Лл / ρ=>1Т^3Т г+,-Y1T1?Л г/2; Т2(т+<и т. д.;.a=; _i JL]1W4~EJ\8 3/2GJp
Смотрите также:
| Общая формула для определения перемещений. метод мора | Применение способа верещагина к стержням переменного сечения |
| Перемещения, вызванные действием температуры | Потенциальная энергия деформации |
