
Оглавление:


Определение кривизны кривой и ее вычисление
Определение кривизны кривой и ее вычисление.Γ= {/*( § ); ОС » 5}-непрерывно дифференцируемая Итак, фиксируемая кривая, 5-переменная длина дуги 0 50 5, Dz = z-z0, a = a(z) угол между касательными Предположим кривую Γ в точках a (50) и r (50 + D3), a (5)> 2 0 для D3 <r0 и A (s) a0 для D3-0.Очевидно, что да = А (ч)-(С0)= А ©, а(С0)= Теперь давайте сделаем 1 © •как показано, 1 (h) это Единичный вектор (см.(16.16)) параллелен касательной кривой в соответствующей точке(и см. 16.4), следовательно, угол Da также является углом между вектором 1(s0)и*(504-Dz). Определение 2.Угловая скорость касательного единичного вектора 1 = называется кривизной в определенной точке кривой K (z0) кривой в этой точке, k (z0)= o) (50; /)=. Если вы опустите значение аргумента для краткости,、 Так как| | / / = 1, то, по следствиям§ 17.1 леммы 2.
Так, в случае окружности, ее кривизна постоянна (не зависит от точки) и равна обратному следующему. Людмила Фирмаль
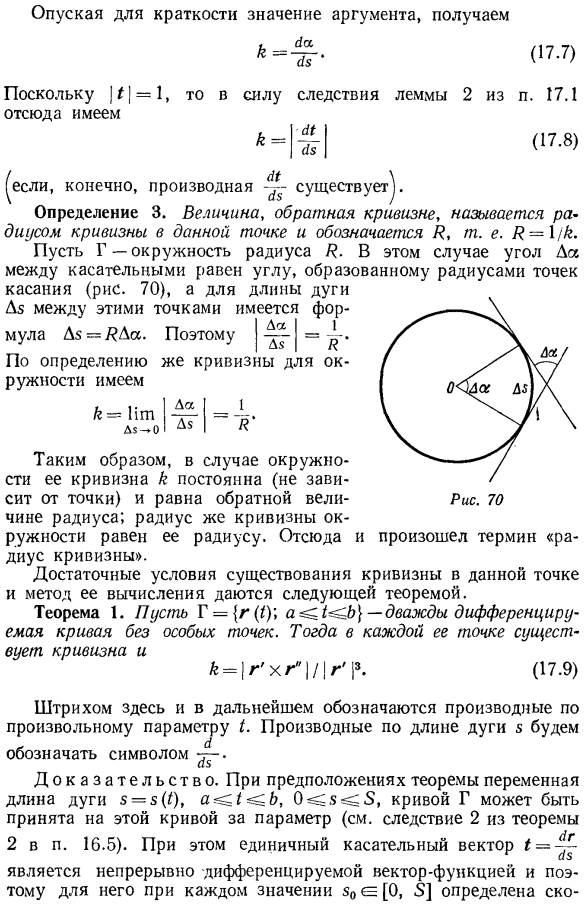
- Конечно, производные Определение 3.Обратная кривизна называется радиусом кривизны в определенной точке I, то есть 7? = 1/6. Пусть Γ-окружность радиуса H По определению кривизны окружности、 70. Радиус ранга. Радиус кривизны окружности будет равен ее радиусу. Именно отсюда происходит термин радиус кривизны. Достаточные условия наличия кривизны в заданной точке и метод ее вычисления определяются следующей теоремой: Теорема 1.Γ= {/•( * ); и-2 раза для производной Кривые кривые без специальных точек. Тогда в каждой из этих точек есть кривизна.
- Тире здесь и ниже показывает дифференциал относительно любого параметра I. дифференциал для длины дуги 5 равен、 Символизировать Доказательство. В предположениях теоремы переменная длина дуги равна 5 = 5 (*), a ^ 1 ^ b, 0 = ^ 5 = ^ 5.Кривая Γ может быть использована в качестве параметра для этой кривой(см. Результат теоремы 2) 2 в 16.5).Кроме того, единичный касательный вектор I = Для каждого значения 50 = [0, 5] оно определяется быстро (я также использовал формулу (16.13)). Тс Его скорость вращения w (50; I), то есть кривизна определяется в каждой точке кривой Г Где a = A (s) угол между векторами и выбирается. Как показано в начале этого paragraph. In в частности, это означает, что для всех s e [0, 5]выполняется неравенство 5 = 0. Из формулы
Таким образом, вектор r и r’ всегда будет коллинеарным. Людмила Фирмаль
- Является arns, и функция 5 ’(I) не изменяет знак, поэтому вектор, показанный всегда имеет один путь (для z’(1) 0) или всегда противоположное направление (для z ’(1) 0). Кроме того, в первом случае достаточно малому приращению AI соответствует приращение A-Z с тем же знаком, а во 2-м случае-приращение AI. opposite. By что было сказано, если= = 5(0 0 0), и [[a, b], и ρ= p (() это угол между вектором r ’(/0)и r’ (/), то I = [a, b]будет p = a или Все I e [a, b]будут p = —a (см.§ 17.1).) Здесь, используя формулы (17.10), (17.11) и лемму 2, получаем следующее: Вы можете легко перейти от формулы (17.9) к формуле кривизны координаты record. In факт, r ’=(x’, y’, r’), r «(x», y», r») и (Где/, / Λ-единичный вектор в направлении осей Ox, Oy и Og соответственно)、 Если вы подставите (17.12) и (17.13) в (17.9), вы найдете нужное выражение.
Смотрите также:
| Физический смысл производной вектор-функции. | Главная нормаль. Соприкасающаяся плоскость. |
| Две леммы. Радиальная и трансверсальная составляющие скорости. | Центр кривизны и эволюта кривой. |
