
Оглавление:


Параметрические заданные кривые.
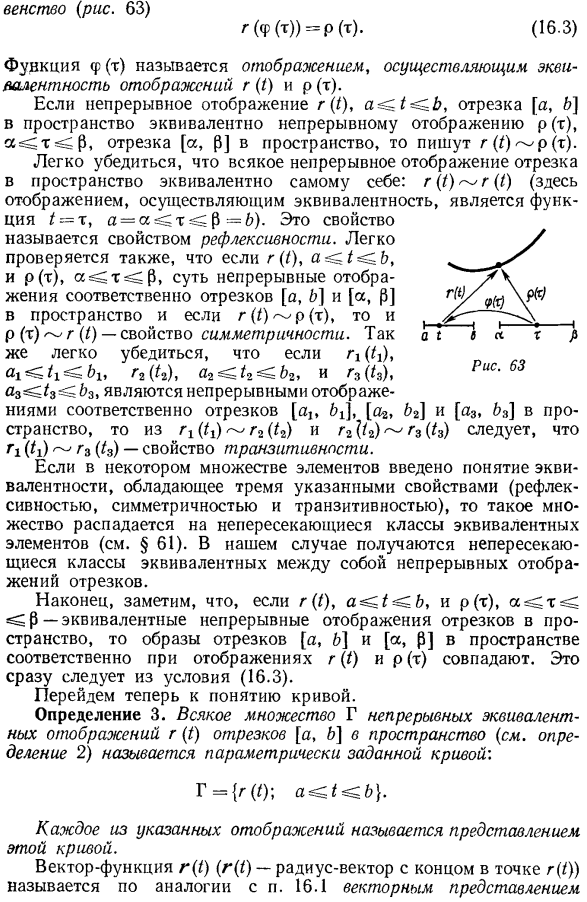
Параметрические заданные кривые. Чтобы построить точную теорию кривых, допускающих различные представления, мы сначала вводим понятие эквивалентного отображения сегментов в пространство. Определение 2.Непрерывное отображение r (I) в пространство отрезка[a, b \называется эквивалентом непрерывного отображения p (m) в то же пространство отрезка[α.).Такая непрерывная строго монотонная функция= = φ (τ) (τ, увеличение или уменьшение) отображает отрезок[a, p]на отрезок[a, b], для каждого m∈[a, P Корона (рисунок 63) Функция φ (τ) называется отображением, которое реализует эквивалентность между отображениями r (1) и p (τ). Для непрерывного отображения r (1) сегментов[a, b] в пространство соответствует непрерывное отображение p (m) в пространство интервала[a, P], и мы пишем/ «(t)<p(t).
Легко видеть, что непрерывное отображение в пространство сегмента эквивалентно самому себе. Людмила Фирмаль
- r (1)<r (1) (здесь отображение, реализующее равенство, является функцией 1 = a = A ^ a-b).Это свойство Называется отражающими свойствами.Вы также можете легко увидеть, что r (1), a> 1 <b и p (m) непрерывны. Поместите отрезки[a, b]и[a, p]z в пространство соответственно, а в случае r (1) p (m)、 p (m) r (1) является a symmetry.It также легко проверить следующее: a3 ^ 13 ^ b3, сегмент [a1 (b^\, [a2, 62] и [a3, 63], соответственно, непрерывное отображение в пространство, тогда r1(11)R ^ R2(2)и r2 ^ r3 (13) (^1) T3 (13), T1 является транзитивным свойством. Если понятие эквивалентности вводится в определенный набор элементов и обладает 3 заданными свойствами (отражательная способность, симметрия и транзитивность), то такой набор делится на непересекающийся класс элементов эквивалентности (см.§61).
В этом случае эквивалентное непрерывное отображение сегментов получается с голым классом друг к другу. Наконец, r (1), p (m) и m ^ P-эквивалентное непрерывное отображение сегмента в пространство, и изображения сегментов[a, b \и[a, P] в пространстве под отображением r(I)и p(m), соответственно, совпадают.Это следует сразу же после условия (16.3). Далее мы возвращаемся к понятию кривой. Определение 3.Все множества последовательных эквивалентных отображений r (1) в пространство отрезка[a, b \(см. Определение 2) называются параметрическими заданными кривыми. Каждое из этих отображений называется представлением этой кривой. Векторная функция r (1) (где r (1) радиус-вектор, который заканчивается в точке r (1)) называется векторным представлением, как в пункте 16.1.
- Учитывая параметрическую кривую G для r(1)=(x (1), y (1), r (1)) функции x (1), y (1), rG, a>b называются координатным представлением кривой G, заданной параметрическим. Очевидно, что параметрические определенные кривые однозначно определяются их соответствующими representations. By это, например, в обозначении Γ= {/■( / ); (удобнее); правильно Часть уравнения понимается как a ^ 1 ^ b, а не как совокупность всех представлений кривой Γ, но как совершенно четкое представление Γ (1).оно продолжает делать это не только в указанном случае, но и в случае как векторного, так и координатного представлений. Examples. In наше определение, параметрическая определенная кривая Как уже упоминалось в разделе 16.1, они совпадают как набор точек на плоскости, но с разными кривыми. Эти множества представляют один и тот же круг x2 + r / 2 = 1.
In в первом случае этот круг»исполняется» 1 раз, во втором-2 раза. Выражение Установите то же самое curve. In дело в том, что функция m = 1 + 3m I непрерывна, строго монотонно возрастая в интервале [i / 2, i / 2], Преобразуя одно выражение в другое. Множество точек кривой в этом случае образует полукруг x2 + r / 2 = 1, x ^ rO. Учитывая выражение f• (/), a> 1 <b, для некоторой непрерывной кривой, для фиксированного значения параметра I, по r (1), конечно, точка^ e [a, B]. ЗОпределение 4. Р (1), а-с, 1-> B и с (м) 2 представления кривой Γ, заданной параметрическим, cp, являются отображениями, которые реализуют их эквивалентность(см. Определение 3).
Здесь мы определяем то, что называется точкой кривой, заданной параметрически, то есть кривой, определяемой как класс эквивалентного непрерывного отображения сегмента. Людмила Фирмаль
- Пусть I = p (m), пусть m-p, пусть I b(и значение m, а следовательно, и значение I фиксировано), пусть r(1)= p (m).Эта точка в пространстве обозначается через P. P = r ((() = p (m).Пары PP, 1) и(P, m) называются равными. Равенство пар (P, I) и (P, m) совпадает с символом (P、 1) (Р, 1)^(Р, Я); 2) Если(P, 1)^(P, m), то(P, x)〜(P, 1); 3) (P, k)^(P, 2) и (P, k)〜(P, K), (P,^ 1)〜(P, k) Определение 5.Кривая Г, определенная для конкретного параметрического Совокупность всех эквивалентных пар (P фиксирована) {(P, f)) называется точкой этой кривой, а точка P-ее опорой. Каждая точка {(P, I)} определяется параметром.
Смотрите также:
| Производная и дифференциал вектор-функции. | Ориентация кривой. Дуга кривой. Сумма кривых. Неявное задание кривых. |
| Понятие кривой. | Касательная к кривой. Геометрический смысл производной вектор-функции. |
