
Оглавление:


Электромагнитный вращающий момент асинхронного двигателя
Электромагнитный вращающий момент асинхронного двигателя. Электромагнитный момент асинхронного двигателя создается взаимодействием вращающегося магнитного поля машины и тока Ротора. Величину этого момента можно определить по электромагнитной силе \ я ^〜 iost: M =где yo-угловая скорость синхронизации. b2o Как видно из Формулы (3.3), n = sopz1 M = M0 | M2 = Mst-чистая мощность двигателя P2 = M & (7.30)) Здесь-угол поворота скорости вращения ротора. Мощность на холостом ходу Po = Rms * + RDO B = M0Y. (7.31) Общая мощность машины, развиваемая роторами、 PmxP2 =(Mi + Mg) = = Λ1. (7.32) Как видно из энергетического рисунка, потери мощности Ротора медные(рисунок 7.5)、 Rm2 = Ram-Rmx = LSh-M = M (a0-P)= «• = MPo ° -= rem$ = MJoh. (7.33) 12o Учитывая равенство(7.28)、 (7.34)) MI ^ = m11r ^ r2 \ М = tx1g ’* yy’ / $ Oo (7.35 утра).
Поскольку величина электромагнитного момента пропорциональна мощности напряжения, приложенного к двигателю, следовательно, асинхронные двигатели очень чувствительны к изменениям напряжения. Людмила Фирмаль
- Откуда он взялся Получить зависимость момента от напряжения клемм статора и параметров двигателя、 Используя L-образную эквивалентную схему (рис. 7.4), из которой следует текущее значение =. C V(Cr1 + C * Gg ’/ 8) * +(Cx1 + & b’)* ’ Отсюда (7.36)) Я / = UTO + SG7 / 5U2 +(x%+ Cxg ’)* 0. = 2л ^ 60. 60. \ _ п 2л /( M =получается Т ^ зыы / г 2π&[(r,+ Cl> ’/ x) 2+(A-1 b C * a’)*] сказал он. 31. (7.37)) Подставим значение и величину 1g из уравнения (7.35) в уравнение момента (7.35 Выражение этого момента полезно для анализа работы двигателя. Это связано с тем, что 6 \ = soP51 содержит практически только 1 переменную (slip 5 Из Формулы (7.37), 5 = const!
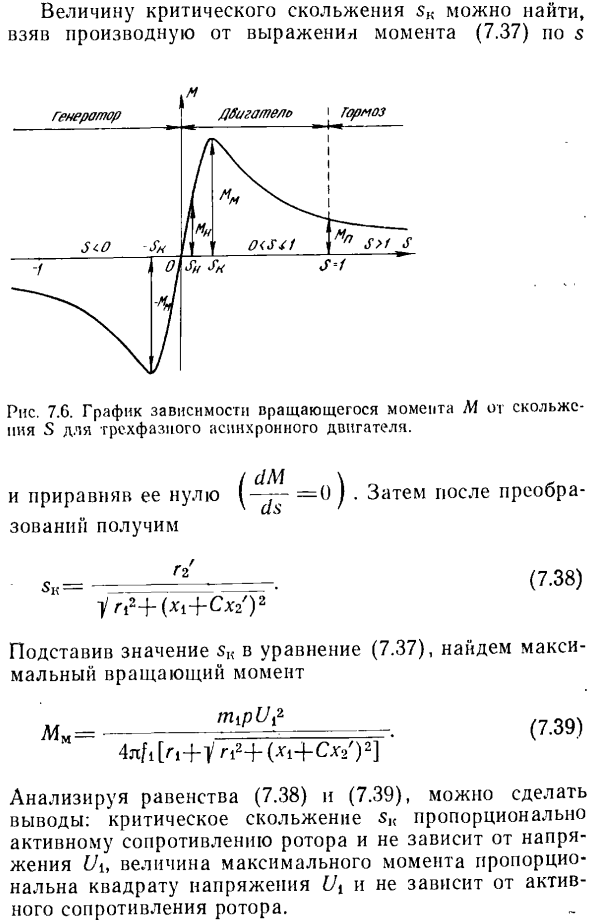
B ’ ^ const зависимость M = 1 ($)!И/ 1 = sop $ 1 показано на рисунке. 7.6.Из графика видно, что на старте(5 = 1; n = 0) двигатель генерирует пусковой момент Mn, и его значение можно получить, подставив 5 = 1 в Формулу (7.37). Когда M больше, чем статический момент, двигатель rotates. In в этом случае с увеличением скорости вращения (уменьшением на 5) электромагнитный момент возрастает, достигая максимального значения М при некотором скольжении 5 К, что называется критичностью, и момент уменьшается до тех пор, пока МСТ не уравновесится. А если приравнять его к нулю、 (США ’S / T» = 0 1.После преобразования Критическое значение скольжения$ » можно найти, используя производную уравнения момента(7.37), но、 (7.38) Y G1 * +(X1 + CX2′) 2 Подставляя значение формулы (7.37), можно увидеть максимальный крутящий момент.
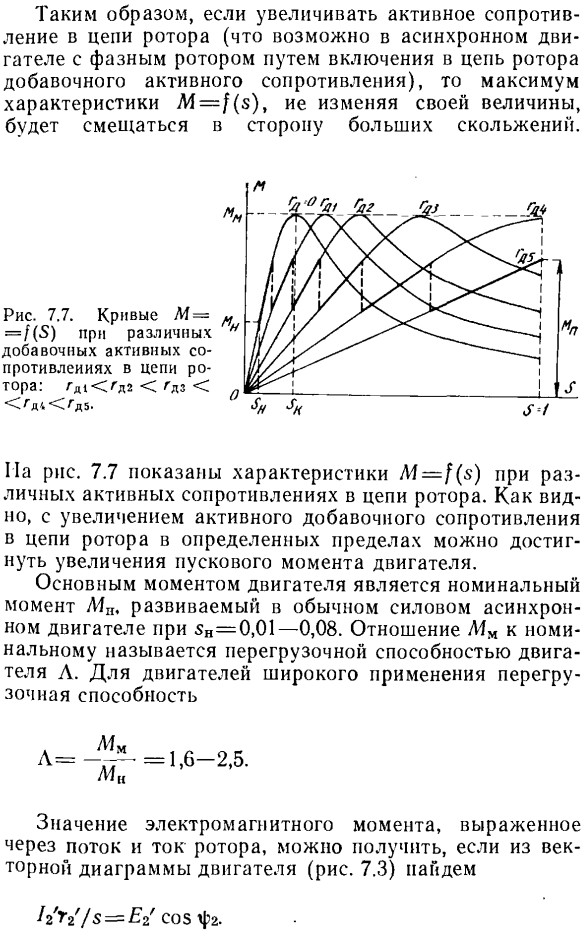
- При анализе уравнений (7.38) и(7.39) можно сделать вывод, что критическое скольжение$пропорционально активному сопротивлению Ротора, не зависит от напряжения i] 1, а максимальный крутящий момент пропорционален напряжению 2 мощности и не зависит от активного сопротивления Ротора. I tkr1)? ’»1 ^ ——-• 4Я / 1 [Г1+УП * + (дг1 + сх2/) 2] Таким образом, увеличение активного сопротивления роторной цепи (возможно при асинхронном двигателе с фазным ротором за счет включения дополнительного активного сопротивления в роторную цепь), изменение его значения максимального значения характеристики M = /($) сдвигает в сторону большего проскальзывания. Рис. 7.7.Кривая М= / (5) добавлено активное сопротивление различных цепей Ротора: / d1 <ГД2 < / дз < Gd4 <Тела Gd5.
Фотография лошади. 7.7 показана характеристика M = / ( $ ) в различных активных сопротивлениях Ротора circuit. As как видно, увеличение пускового момента двигателя может быть достигнуто, если активное дополнительное сопротивление цепи ротора увеличивается в определенных пределах. Главным моментом работы двигателя является Номинальный крутящий момент M1, который был разработан с помощью обычного асинхронного двигателя мощностью$ n = 0,01-0,08. отношение мм к номинальному значению называется перегрузочной способностью двигателя А.
Это функции скольжения, которые помогают понять физическую ситуацию формирования электромагнитных моментов. Людмила Фирмаль
- Для двигателей, широко используемых, перегрузочная способность Из векторной диаграммы электродвигателя можно получить значения электромагнитных моментов, представленных потоком и током Ротора (рис. 7.3) ИГ? R ’ / 5 = Er so5 fg. Если вы присвоите значение 1πЫ/ $выражению (7.35), вы получите: M = CO5 ^ 2. 12o 2л [( ^ L / 1 Е * = 4№№\ \ Ф* *и Йо =так、 П.. 4.44 t / A01I) 1/,/?Частотная модуляция、 M = 7 / 2СО $ 4 ′ 2 = 2L / 1 (7.40 утра )) = !Yy m ^ o ^ / e / g ’Fm C05 |)2 = CM / 2, FM C05 4’2、 2 вечера Где см = м ^ оч2 вечера Выражение (7.40) показывает, что M зависит от величин Φ,/ 2 и soo 1 ^ 2.
Смотрите также:
