
Оглавление:


Преобразовательные элементы
- Элемент Transform Система контроля отклонения корректора преобразует управляющий сигнал. Для этого они состоят из элементов, называемых удобно конвертируемыми. В сложных системах управления основная часть дополнительных схем (компенсация и форсирование) также является коэффициентом преобразования. Используются такие элементы преобразования, как электрические, механические, гидравлические и пневматические, но наиболее широко используемые — электрические элементы. Давайте рассмотрим основные из них. Обмен переменного тока.
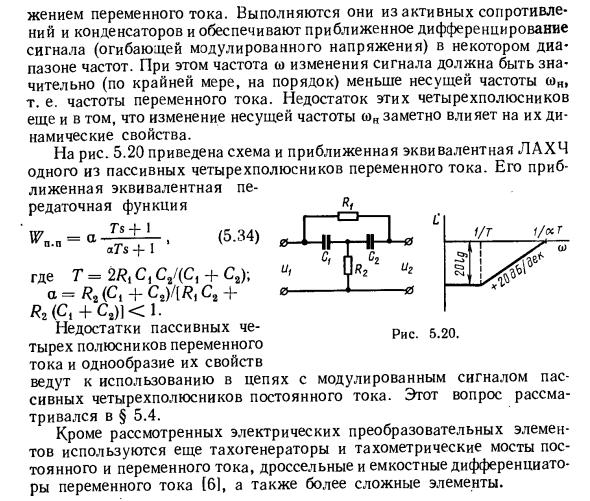
Они состоят из активных резисторов и конденсаторов, которые обеспечивают приблизительную производную сигнала (огибающую напряжения модуляции) в определенном диапазоне частот. В этом случае частота c изменения сигнала должна быть значительно (по меньшей мере, на порядок) меньше несущей частоты cn, то есть частоты переменного тока. Недостатком этих квадруполей является то, что изменения несущей частоты не оказывают существенного влияния на динамические характеристики.
На рисунке 5.20 показан LAHCH, который приблизительно эквивалентен одной из пассивных четырехполюсных диаграмм переменного тока. Людмила Фирмаль
Его приблизительная эквивалентная передаточная функция <5-34> Где Т = 2 /? , C, C, I (C, + C2); a = + Q / {+ R] <1. Недостаток пассивного 4-полюсного источника переменного тока и однородность его характеристик приводит к использованию пассивного 4-полюсного источника постоянного тока в цепях, использующих модулированные сигналы. Этот вопрос был рассмотрен в 5.4. В дополнение к рассматриваемым электрическим преобразовательным элементам используются тахогенераторы постоянного и переменного тока и тахометрические мосты, дроссели переменного тока и дифференциаторы емкости [61], а также более сложные элементы.
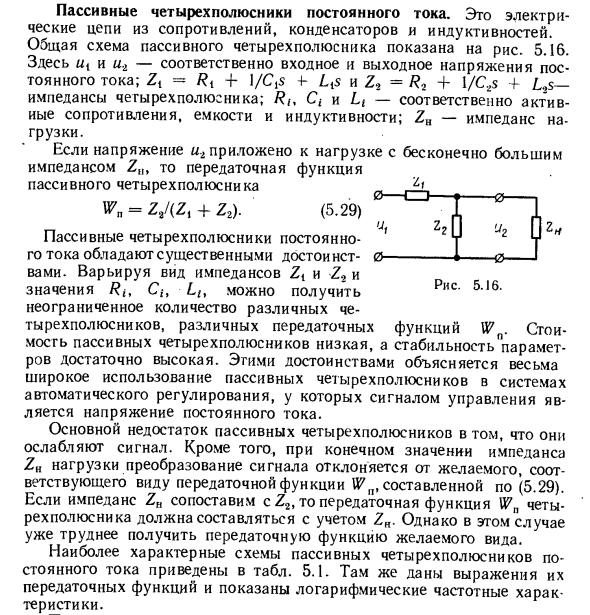
Это электрические цепи резисторов, конденсаторов и катушек индуктивности. Общая схема пассивного 4-контактного терминала показана на рисунке. 5,16. Где {и .. 2 — входные и выходные напряжения постоянного тока соответственно. Zt = /? T + 1 / C, s-Lts и Z * = R2 -f 1 / C2s -f L., s — полное сопротивление сети с 4 терминалами. Rt, Ci и Lt — активное сопротивление, емкость и индуктивность, соответственно. ZH — сопротивление нагрузки. Когда напряжение u подается на нагрузку с бесконечно большим сопротивлением Z „, передаточная функция Пассивный квадрупольный Этот ток имеет другие преимущества. Путем изменения формы импеданса Zt и Z.2 и значения Rit Cit Lt> Неограниченное количество разных квадруполей, разные передаточные функции Wп.
- Стоимость пассивных квадруполей низкая, а стабильность параметров очень высокая. Эти преимущества иллюстрируют очень широкое использование пассивных 4-контактных устройств в системах автоматического управления, где управляющим сигналом является напряжение постоянного тока. Основным недостатком пассивных квадруполей является то, что сигнал ослаблен. Кроме того, при конечном значении импеданса нагрузки ZH преобразование сигнала отклоняется от требуемого преобразования, соответствующего форме передаточной функции Wп, скомпилированной в соответствии с (5.29). Если импеданс ZH сравним с Z2, передаточная функция tt 4 клемм с учетом клеммы Z? N должен быть создан. В этом случае, однако, уже трудно получить требуемый тип передаточной функции.
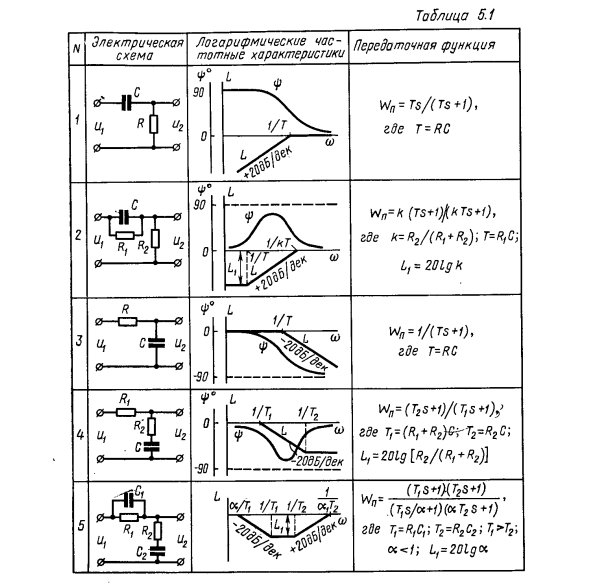
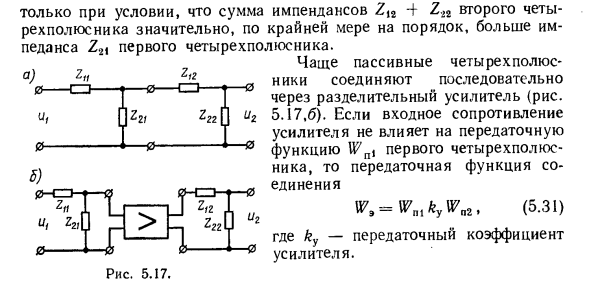
Наиболее характерная схема пассивной 4-портовой цепи постоянного тока показана в таблице. 5.1. Также показано уравнение передаточной функции, показывающее логарифмическую частотную характеристику. Принято разделять квадруполь на дифференциацию, интеграцию и интегральную дифференциацию. Различение квадруполей в определенном частотном диапазоне (схемы 1 и 2 в таблице 5.1) дифференцирует сигнал и вызывает положительный сдвиг в (|) азе. При интегрировании квадруполей (схемы 3 и 4 в таблице 5.1) в определенном диапазоне частот сигналы интегрируются, и возникает отрицательный сдвиг фазы. Квадруполь с интегральной производной (рисунок 5 в таблице 5.1) дифференцирует сигнал в одном частотном диапазоне и интегрирует его в другом. Иногда оказывается, что целесообразно или необходимо соединить два пассивных квадруполя последовательно (рис. 5.17, а).
Передаточная функция такого соединения W9 = WalWni (5.30) Людмила Фирмаль
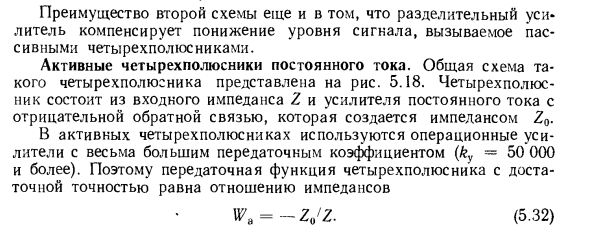
Таблица 5.1 N электрическая схема логарифмическая передаточная функция частотной характеристики 1 H «0— -0 -0 90 0 Wn = Ts / (Ts + l), где T-RC р . „C 0 -J) U2 -0Г90 0-L (rs + i) / (f T2 \ <<; Lt = 20 log «2 ’21 ’22 -0- -0 Рисунок 5.17. (5,31) -wul ky Wn2 » Где ky — передаточное число усилителя. Преимущество второй схемы состоит в том, что усилитель изоляции компенсирует ухудшение уровня сигнала, вызванное пассивными 4-контактными устройствами. Активный полюс постоянного тока. На рисунке 1 показана общая схема такого 4-контактного терминала. 5,18. 4-портовая сеть состоит из усилителя постоянного тока с входным импедансом Z и отрицательной обратной связи, создаваемой импедансом Z0.
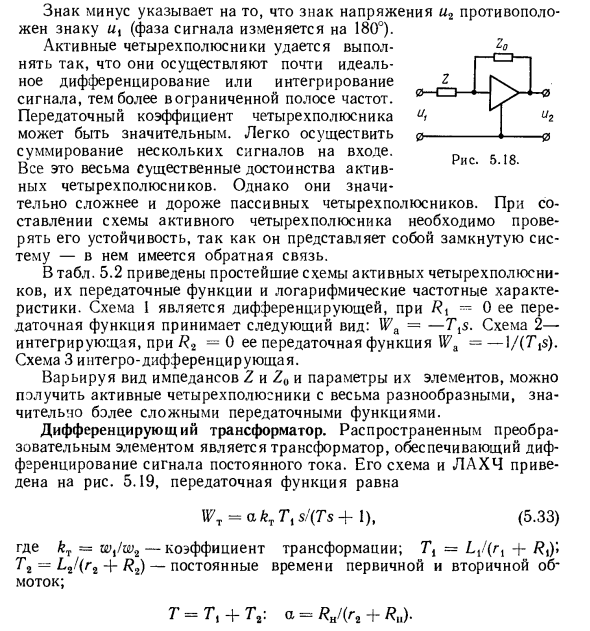
Активные 4-портовые устройства используют операционные усилители с очень большими передаточными числами (ky-50000 и выше). Следовательно, передаточная функция с четырьмя терминалами с достаточной точностью равна отношению полного сопротивления. (5,32) V .— ZJZ. Знак минус указывает на то, что напряжение и знак 2 противоположны А (фаза сигнала изменяется на 180 °). Активные квадруполи могут быть запущены для выполнения почти полной дифференциации или интеграции сигнала, особенно в ограниченной полосе частот. Квадрупольные передаточные числа могут быть важны.
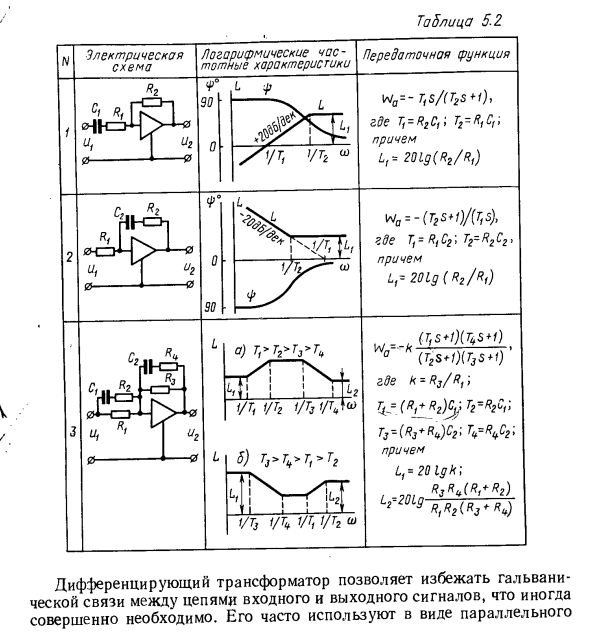
Легко суммировать несколько входных сигналов. р Все это очень важные преимущества активных 4-терминальных устройств. Однако они намного сложнее и дороже, чем пассивные 4-терминальные устройства. При создании активной 4-контактной цепи это замкнутая система, поэтому необходимо проверить ее устойчивость — есть обратная связь. В таблице. 5.2 показывает простейшую схему, передаточную функцию и логарифмические частотные характеристики активной 4-портовой сети. Схема 1 дифференцирована, и в Rx-0 ее передаточная функция принимает вид: Wa = -T {s. Схема 2 является интегралом, R2 = 0 и передаточная функция \ Va = –1 / (r, s). Схема 3 является интегральной дифференциацией.
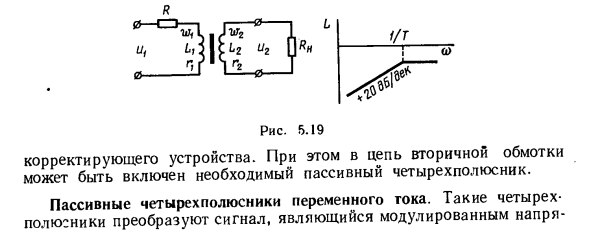
Изменяя форму импедансов Z и Z (j и параметры их элементов), можно получить активную четырехполюсную сеть с очень разнообразными и гораздо более сложными передаточными функциями. Дифференциальный трансформатор. Общим элементом преобразователя является трансформатор, который различает сигналы постоянного тока. На диаграмме показана его схема и ЛАХЧ. 5.19, передаточная функция равна Wr-akvTts / (Ts + 1), (5.33) Где kT — вес / w2 — коэффициент пересчета. Г = Li / (rl 4- /?,); T2 = L2! (R2 + R2) — постоянная времени первичной и вторичной обмоток. Γ = γ1 + Γ2: a = RJ (r 2 + βn). Таблица 5.2 Логарифмическая частотная характеристика Электрическая цепь
Передаточная функция TfsRgC ;; T2-R, C и более Lr-20lg (Rz / Rh) ‘A ^ -iVO / frs), где Tt = RiC2’, T2 = H2C2 и 20 фунтов (R2 / R,) R Около 90 w-fr tts + txwi) К ————— ” 0 (T2s + 0 (r3s * i), где k = Rj / R, далее L = 20 Iffk; а) Γ,> Tr> Γ3> b VRF U W W / 5) rj> ^ rt> T2 4! И.Л., я <я Wj i / T4 u l / T2 w RjRJR, + R2) L2—20lg- RIR2 (RJ + Ru) Дифференцирующие трансформаторы избегают гальванической связи между цепями входного и выходного сигнала, но это может быть абсолютно необходимо. Часто используется параллельно. R Рисунок 5.19 Корректирующее устройство. В этом случае требуемая пассивная 4-терминальная сеть может быть включена во вторичную цепь. Пассивный 4-полюсный переменный ток. Такой квадрупольный преобразователь сигнала, который является модулированным напряжением
Смотрите также:
Решение задач по теории автоматического управления
| Корректирующие устройства | Задачи синтеза систем автоматического регулирования |
| Комбинированное регулирование | Выбор параметров по минимуму интегральной оценки |
