
Оглавление:


Комбинированное регулирование
- Комбинированное регулирование В предыдущем параграфе рассмотрены основные методы улучшения статических и динамических характеристик и повышения качества системы автоматического регулирования отклонения. Все эти методы представляют собой только конкретные изменения параметров или структуры отдельных участков замкнутого контура и не влияют на принцип работы системы. Помимо принципа регулирования с помощью отклонения, существует также принцип регулирования с помощью внешнего воздействия (возмущения), и их одновременное использование имеет большой эффект.
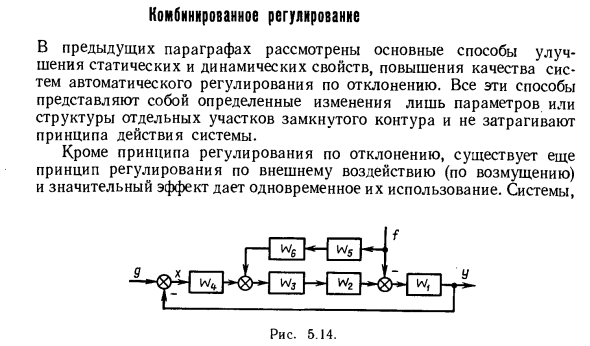
Система Рисунок 5.14. Когда используются оба принципа, они называются комбинированными элементами управления, добавляя цепочку внешних воздействий в дополнение к замкнутому контуру управления. В зависимости от того, затронуты ли помехи или помехи, создаются дополнительные цепи, и объединенная система делится на два класса. Сложная система регулирования. Сложные правила в основном используются в системах с сильными помехами, чтобы уменьшить их влияние.
Система с дополнительной цепочкой основных возмущающих воздействий в дополнение к замкнутому контуру управления называется составной системой управления. Людмила Фирмаль
На рисунке 5.14 показана типичная блок-схема такой системы. Здесь Wif W3 — передаточная функция двух ступеней регулируемого объекта, привода и усилителя. А-измерение дополнительной цепи возмущения и передаточной функции преобразовательного элемента. Wit W3 — это замкнутый контур, который контролирует отклонение. Обеспечивает воспроизводимость с контролируемыми значениями операции g и уменьшает влияние вторичных внутренних и внешних возмущений (эти возмущения не показаны на структурной диаграмме).
Цепочка основного возмущения / дополнительного движения, состоящая из элементов W5 и We, направлена на компенсацию естественного влияния этого возмущения на регулируемые координаты. Поэтому дополнительные схемы должны называться компенсационными. В цепи компенсации требуется элемент, который измеряет помехи. Кроме того, элемент, который преобразует принятый сигнал, необходим для создания компонента регулирующего действия z, который компенсирует естественный эффект скорректированной координаты y. Схема компенсации обычно включается в прямую схему системы между каскадами усилителя или на входе (если есть) устройства последовательной коррекции.
- Сконфигурируйте передаточную функцию для возмущения в соответствии со структурной схемой составной системы управления (рисунок 5.14). tt ^ UMttVutt ^ -lW + П (5-24) Где WK.U = WbW6 — передаточная функция цепи компенсации. Передаточная функция W-разомкнутого контура. если WK.uW3Wt = \, (5,25) Передаточная функция системы для возмущения / равна нулю, а возмущение / не влияет на регулируемую координату y. Говорят, что регулируемая координата у инвариантна (независима) от возмущения /. Следовательно, уравнение (5.25) является условием для полной инвариантности / y. Полная инвариантность (переход к переходной конфигурации) называется независимостью управляющей координаты y от изменений возмущения.
Независимость функции y (t) от вида функции f (t) Однако начальное значение возмущения и его производная создают регулируемую компоненту координатного перехода. Однако, если возмущение и его начальные производные не влияют на регулируемые координаты, существует абсолютная инвариантность, и для достижения этого должны быть выполнены дополнительные условия. Поэтому в рассматриваемой системе абсолютная инвариантность имеет место только в неинерциальном элементе W2t W3.
Удовлетворение условиям полной инвариантности (уравнение (5.25)) чаще всего связано со значительными трудностями из-за инерции основных элементов. Людмила Фирмаль
Например, Wy = kt / (Tts + 1); = bjij% s2 + 2 £ 7> + 1); Подставьте эти значения для передаточной функции в (5.25), чтобы получить условие инвариантности ! / («№ = * K.uOV + l) (7ls2 + 2S7> +1) = = bKjTirts? + (7i + 2lT2T3) s * + (Ta + ‘2ZTi) s + 1 | Где feK.u = Mk ^ k ^ В этом случае для полной инвариантности элементами преобразователя схемы компенсации являются первый, второй и Третья производная от элемента измерения сигнала. Дифференцирование нескольких сигналов является сложным и неточным и значительно увеличивает уровень помех, поэтому фактически ограничивается созданием производных, которые не выше второго порядка.
Предположим, что схема компенсации реализована с передаточной функцией. + 1), То есть элемент преобразователя вырабатывает только первую производную входного сигнала. Тогда получим из (5.24) w _ [T | 7U + (i + 2cr2r3) jsa ‘OV + 1) (7 | s * + 2? R, s + ) (T3s + l) + M «M« В выбранной компенсационной сети возмущение и его первая производная не влияют на регулируемые координаты. Однако самая высокая производная возмущения, начиная со второго, влияет на регулируемые координаты так же, как если бы не было корректирующей цепочки. В этом случае достигается частичная инвариантность (включая первую производную) от y из /. Чем плавнее функция / (/), тем эффективнее коррекция. В частичной инвариантности начальное значение возмущения и все его производные создают компонент перехода y так же, как и полная инвариантность.
Однако передаточная функция выбранной схемы компенсации не может быть реализована. Физически могут быть реализованы только передаточные функции, чей порядок числителя меньше или равен порядку знаменателя. Следовательно, в рассматриваемом примере компенсационная сеть может быть реализована только с передаточной функцией. ^ k.u = * k.uI (7,3 + 2 | 7 ) s + l | / (xs + 1), Где m — достаточно малая постоянная времени. Такая ситуация препятствует точному выполнению инвариантных условий. При запуске элемента с выбранной передаточной функцией неточность в определении фактического элемента и параметров ошибок играет ту же роль (но в принципе может быть реализована).
В результате передаточная функция системы для возмущений не равна нулю даже в лучшем случае (когда требуемое количество производных создается цепочкой коррекций), а коэффициент числителя достаточно мал. В этом случае влияние возмущения на регулируемые координаты очень мало. Принято говорить, что инвариантность достигается вплоть до небольшого значения e. Несмотря на эти трудности, и в большинстве случаев невозможно достичь полной и даже абсолютной неизменности, сложные правила имеют значительные преимущества. Схема компенсации практически исключает или, по крайней мере, существенно уменьшает влияние основного возмущения.
В результате требования к управлению с обратной связью снижаются. Внутри системы стабилизации Зацин может уменьшить передаточное число разомкнутой цепи, уменьшая сложность обеспечения его устойчивости и достаточного запаса устойчивости. Если у вас есть схема компенсации возмущений, замкнутый контур не так уж сложен. Обратите внимание, что схема компенсации не влияет на стабильность замкнутого контура. Однако сама схема компенсации должна быть стабильной. Измерение помех может быть затруднено. Во-вторых, используется несколько методов, которые позволяют последним 151 приближаться к неизменности контрольных координат без непосредственного измерения 151. В частности, создается композитное соединение. Anger). Рисунок 5.15. Интегрированная система слежения.
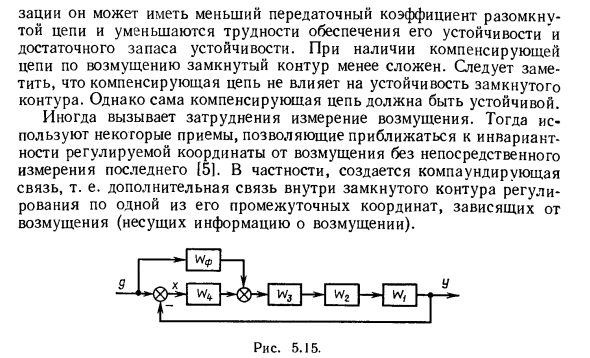
Основная цель системы слежения — максимально точно воспроизвести контролируемые координаты изменения заданных действий. Этому способствует дополнительная цепочка заданных значений. Система отслеживания в этом случае называется составной системой отслеживания, и ее типичная структура показана на рисунке 1. 5,15. Где замкнутый контур такой же, как на рисунке 1. 5.14, а — передаточная функция дополнительной цепи. Эта цепочка обеспечивает переходные процессы при изменении gt и называется повышающей цепью, тем самым улучшая воспроизводимость с помощью регулируемых координат движущего действия. В большинстве случаев он состоит только из элементов преобразователя.
Схема усиления включена в замкнутую цепь так же, как схема компенсации, обычно между каскадами усилителя. В сложных сервосистемах воспроизведение мастер-действий в основном обеспечивается бустерными цепями. В этом отношении замкнутый цикл играет второстепенную роль. Его главная задача — уменьшить влияние помех. На диаграмме структуры составной системы слежения (рисунок 5.15) определите передаточную функцию для основного действия. (5,27) (5,26) И для отслеживания ошибок W ^ O-WWt / WJ / U + W), Где W = WtWtW9Wi.
если Ts7F = WJW = 1 мВт, W9 W3, (5,28) В этом случае передаточная функция для заданного действия равна 1, а передаточная функция ошибки отслеживания равна нулю. Следовательно, (5.28) является идеальным условием воспроизведения, основанным на управляемых координатах действия g вождения и условии неизменности ошибки x отслеживания из действия g вождения. Реализация (5.28) влечет за собой большие трудности, чем реализация (5.25), что является условием инвариантности регулируемых координат от возмущений. Причина заключается в том, что сигнал принудительной цепи должен преодолевать не только инерцию исполнительного элемента контроллера, но и контролируемый объект.
Ранее было показано, что практически невозможно создать производные второго и более высоких порядков. Таким образом, в составной системе слежения достигается только частичная инвариантность ошибки x от главного действия ξ до нуля, первой или второй производной. Это означает статистику 1-го, 2-го и 3-го порядка для основного действия соответственно. Неизбежная (незначительная) инерция дифференциального элемента и неточность в определении параметров и изготовлении элемента контроллера приводит к тому, что частичная инвариантность может быть гарантирована только до небольшого значения e. Тем не менее, сложные правила значительно улучшают точность отслеживания и широко используются. Чем медленнее изменение в действии привода g, тем сильнее влияние частичной инвариантности x на g.
При наличии повышающей цепи роль замкнутого контура сервосистемы уменьшается и может быть составлена из более простых элементов. Цепь наддува не влияет на стабильность замкнутого контура, но сама цепь должна быть стабильной. Если комбинированная система отслеживания имеет сильное возмущение, вы можете еще больше повысить точность отслеживания, создав компенсационное соединение для этого возмущения. Вы можете частично объединить элементы преобразования обеих цепей, и вы можете обнаружить, что вам нужны только элементы, которые измеряют компенсацию, чтобы создать схему компенсации.
Смотрите также:
Решение задач по теории автоматического управления
| Обеспечение устойчивости и повышение запаса устойчивости | Преобразовательные элементы |
| Корректирующие устройства | Задачи синтеза систем автоматического регулирования |
