
Оглавление:


Приведение силы к данной точке. Приведение плоской системы сил к данному центру
- Приведите силу в заданную точку. Приведение плоской системы сил к заданному центру Плоская система любой силы — это система сил, которые так или иначе расположены в плоскости. Любая сила, приложенная к твердому телу, может быть передана в любую точку
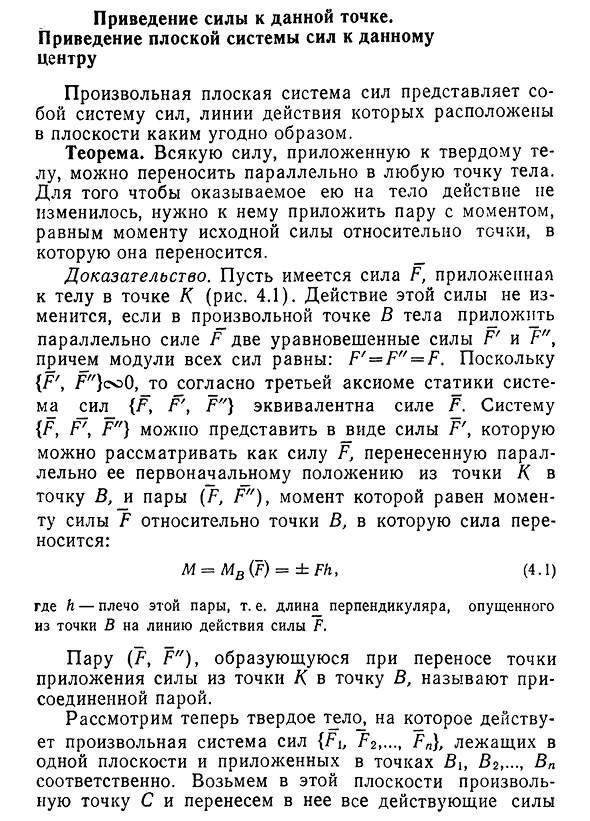
тела параллельно. Для того чтобы действие, действующее на тело, не изменилось, необходимо приложить к нему пару в момент, равный моменту начальной силы, к точке, в которую она передается. Доказательство Пусть сила F приложена к телу в точке K
(рис. 4.1). Действие этой силы заключается в том,что в любой точке тела две Людмила Фирмаль
уравновешенные силы силы F ‘и F’ прикладываются параллельно силе F, где все силовые модули равны, система преобразования{F, f’F»} может быть выражена как сила F’, сила F передается параллельно из точки K в точку B для исходного положения, сила против силы F’.: M=Mb (f)=±F h, (4.1), где h-плечо этой пары, то есть длина перпендикуляра от точки B до линии действия силы F. Пара (F, F»),
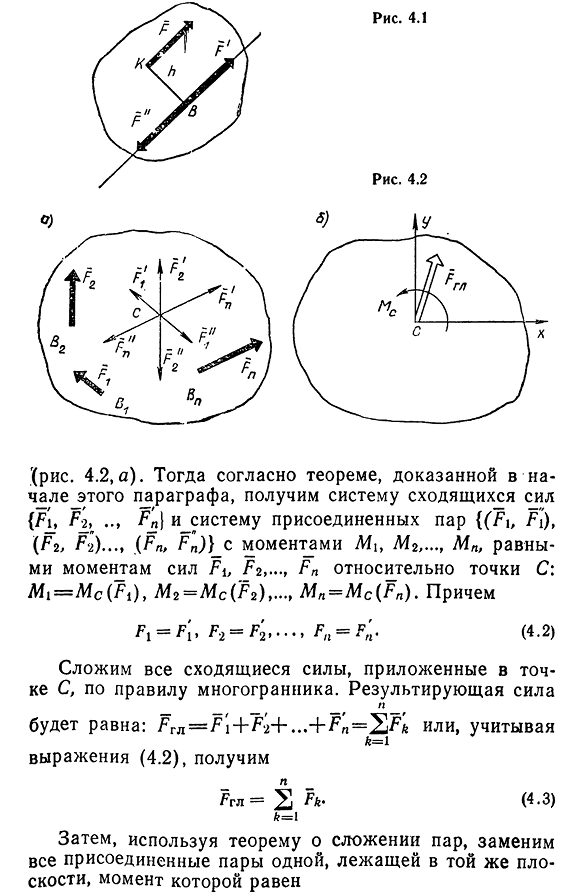
образованная переносом точки приложения силы из точки K в точку B, называется присоединенной парой. Здесь рассмотрим систему{Fb F2, твердое тело, действующее на любую силу…, Fn}применяется в точке B2, лежащей в одной плоскости…, Соответственно, ВП. Возьмем любую точку С в этой плоскости и перенесем все силы, действующие на нее 32 года 4.1 Рис 4.2 g (рис. 4.2, а). Затем, согласно теореме,
- доказанной в начале этого параграфа, мы получаем систему сходящихся сил{Fi, F ‘ 2, Fn) и систему связанных пар{(L,L), (F2, F-i)…, [Fn, Fn)} c момент L4mp момент равен моменту силы Ft, F2…. Fn в точку C: M t=Mc (Ft), M2=Mc (Fi),…, Mn=Mc (Fn). И Ф1=Ф, Ф2=Ф2…… Fn=Fn. (4.2) В соответствии с правилами многогранника добавьте все силы усадки, приложенные к точке C. результирующая сила n будет равна:Frn=F’i+’ F2+…+F n — ^lFk или дано 1 По формуле (4.2)получаем G
g l=2P-(4.3) k=l Затем, используя теорему сложения VS, замените все присоединенные пары на те, которые находятся на одной плоскости, моменты которых равны 3-480 33ms ~ M1+M2+. . . +m p=MS (F,)+MS (P2)+… +MS(?») = =2 » C P ft) — <4-4) L=1 Любая точка тела, где все силы системы передаются параллельно самим себе, называется центром редукции. Величина Frn, равная геометрической сумме всех сил, действующих на тело, называется главным вектором системы. Величина МС равна алгебраической сумме моментов всех сил, действующих на тело, и называется главным моментом системы относительно этого центра относительно центра редукции.
Используя эти термины, полученные выше результаты можно Людмила Фирмаль
сформулировать следующим образом. Плоская система любой силы статически эквивалентна в своем действии:главный вектор этой системы FrJi приложен к центру редукции, главный момент для центра редукции 4.2 (6). Сила Frn не является результатом силы этой системы, потому что она заменяет эту систему не в одиночку, а вместе с присоединенной парой. Из определения основного вектора Frjl это означает, что он не изменяется при изменении центра приведения. Другими словами, если в качестве центра убывания взять разные точки плоскости, то сила GGL, равная основному
вектору, будет одинаковой как по модулю, так и по направлению. Величина главного момента зависит от положения центра редукции (если главный вектор не равен нулю), так как с изменением центра редукции изменяется плечо силы этой системы. Значение Frjl может быть определено либо методом анализа по формуле (1.6), либо геометрическим методом построения силового многоугольника. Значение МС определяется по формуле (4.4)
Смотрите также:
