
Оглавление:


Методика решения задач
- Решение каждой задачи можно разделить на три этапа: На первом этапе мы отбрасываем внешние связи системы организма, учитываем ее равновесие, заменяя ее действие реакцией. Необходимость в этом обусловлена тем, что положения статистики применимы только к органам или системам органов, не имеющим внешних связей. Второй этап. Мы расчленяем систему тела на отдельные элементы. Это дает возможность определить внутренние силы, если это необходимо. Третья стадия. Мы создаем условия равновесия для отдельных
элементов, из которых находим искомое неизвестное количество и направление силы или реакции. В зависимости от метода решения задачи условия равновесия используются в геометрической или аналитической форме.
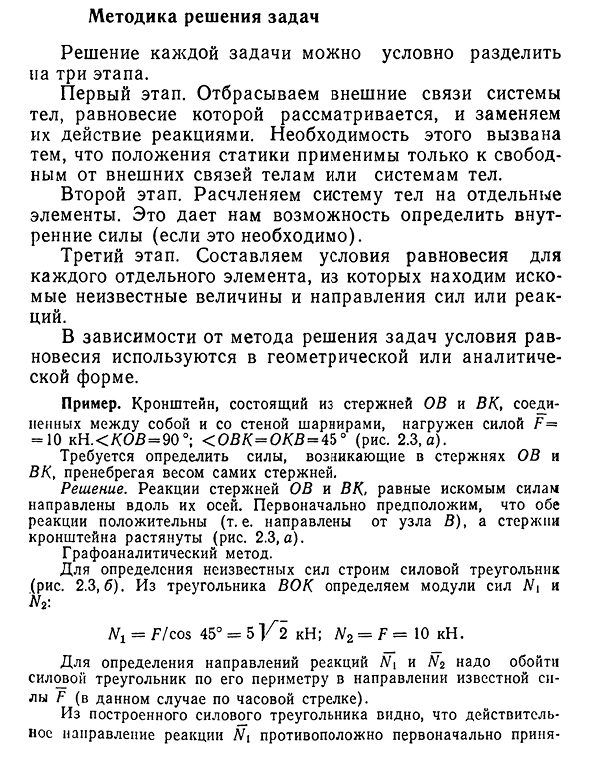
Например. Сила G = = 10kN нагружается, при этом стенка шарнира, который соединен между собой кронштейном, Людмила Фирмаль
состоящим из стержня S и b K.< COV=90°;<HVAC = OKV=45°(фиг. 2.3, а). Игнорируя вес самого стержня, необходимо определить силы, возникающие в стержнях S и VC. Решение. Реакция стержней OV и VC, равная требуемой силе, направлена вдоль их оси. Во-первых,
предположим, что обе реакции положительны(т. е. ориентированы из узла B) и что стержни кронштейна растянуты(рис. 2.3, а). Метод графического анализа. Чтобы определить неизвестную силу, построим силовой треугольник(рис. 2.3, 6). Из треугольника VOC мы определяем силовые модули JVi и iV2: Nt=F / cos45°=5V I kN; N2=F=10kN.
- Чтобы определить направление реакции и M2, необходимо обойти силовой треугольник по его периметру в направлении известной силы F (в данном случае по часовой стрелке). Из треугольника построенной силы мы видим, что действительное направление реакции противоположно первоначальному направлению.- 23^2 6) U смотреть рисунок. В результате стержень S под действием силы F
растягивается, а стержень VC сжимается. Метод анализа. Для решения задачи используется уравнение равновесия (2.4). В зависимости от выбранного осевого направления(рис. 2.3, в) мы имеем 2^= — F — ^ cos45°=0; Nx= — Ficos45°= — 5V I кн. 1FX= — N2 — ^cos45°=0; N2= — cos45°=F=10kN. Знак минус перед Wj указывает на то, что
фактическое направление этой силы противоположно тому, что было первоначально принято на рисунке. 2.3, а. Величина усилия Людмила Фирмаль
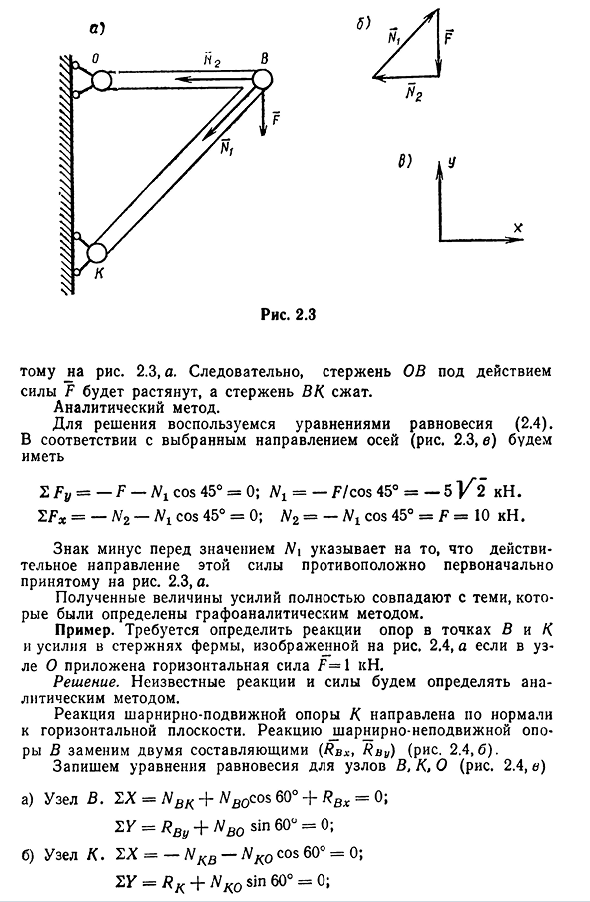
идентична тем, которые определяются графоаналитическим методом. Например. Необходимо определить реакцию опоры в точке B и точке K и силу в стержне фермы, показанную на рисунке. 2.4, и когда горизонтальная сила F=1kN приложена к узлу O. Решение. Неизвестные реакции и силы определяются аналитическими методами. Шарнирно-подвижная опора K реакции направлена по нормали к горизонтальной плоскости. Реакция неподвижной опоры B заменяется двумя компонентами (RBX, RBV) (рис. 2.4, 6). Запишем
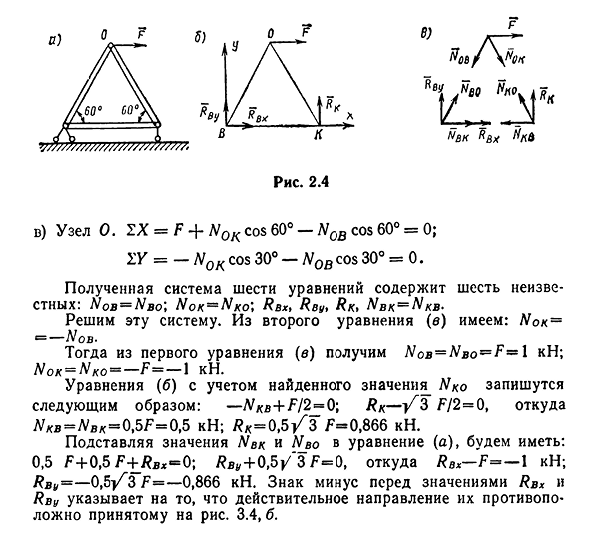
уравнения равновесия для узлов B, K, O(рис. 2.4, В) а) узел B. IX=NBK+NBOcos60°+RBx=0; x y=RB y+NB o5inG0U=0;б) узел K.= — NKB-NK0cos60°=0;2U=RK+NK0 sin 60°=0; 24 » VC KV* С) узел О. Я х=F+компании jvo х cos60°-N0B cos60°=0;£г= — N0K cos30° — N0B cos30°=0. Полученная система из шести уравнений включает в себя шесть уравнений. Стек:Н об=Н бо\п ОК~н Ко\Р ВХ,лей, Р К Н БК=N КБ- Решите
эту систему. Тогда из первого уравнения(b) получим N ob=N B o=F=1kN; N ok=n ko= — F= — \kN. Уравнение (6) если принять во внимание найденные значения: Nkb+F/2=0;RK-V3F/2=0, 2V/fB=a’b/(=O,5F=O,5kN;I K=0, 5/3G=0.866 kN. Подставляя значения n bk и N_bo в Формулу (a), получаем: 0.5 F+0.5 F+/? bx=0; F b^+0,5)/3F=0,где R bx-F= — 1kN;RBy=-0,5}L3F=—0,866 кн. Знак минус перед RBx и RBy указывает на то, что фактическое направление их движения противоположно направлению рис. 3.4, б.
Смотрите также:
| Расчетная схема сооружений. Опорные связи | Принцип Даламбера |
| Основные положения динамики. Законы динамики | Работа переменной силы на криволинейном пути |
