
Оглавление:


Волновые зубчатые передачи
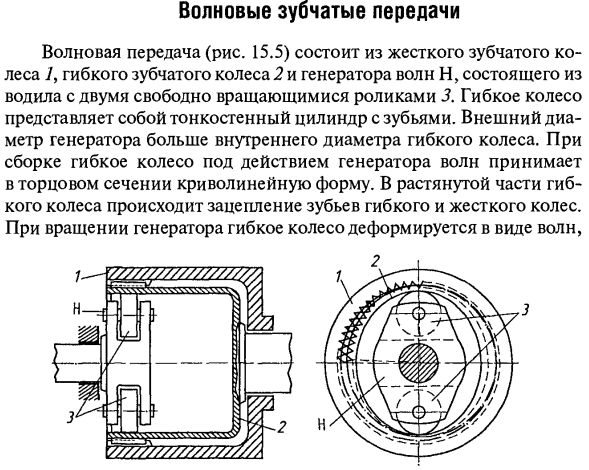
- Волновая передача Y / ^ //////// ZZZ / 7a Волновая передача (рис. 15.5) состоит из генератора волн H, состоящего из держателя с жесткой шестерней U, гибкой шестерни 2 и двух свободно вращающихся роликов 3. Наружный диаметр генератора больше внутреннего диаметра гибкого колеса. Во время сборки гибкое колесо под действием генератора волн принимает изогнутую форму на конце. В растянутой части гибкого колеса, зубья гибкого колеса и жесткие колеса сетки. Когда генератор вращается, гибкое колесо деформируется в форме волны, Бег по кругу Количество зубьев на колесе разное.
Если генератор вращается полностью, подвижное колесо не будет двигаться относительно разницы в количестве зубьев ^ -z2. Волновые генераторы имеют различное количество роликов, кулачков и электромагнитных роликов. Может быть размещен внутри и снаружи гибкого колеса. Существует много схем передачи волн. На фиг.15.6 показана схема с неподвижным гибким колесом 2 и вращающимся жестким колесом 1. Скорость генератора обозначена ln, а частота вращения колеса — n.
Следовательно, когда они последовательно образуют сетку, происходит относительное вращение колеса. Людмила Фирмаль
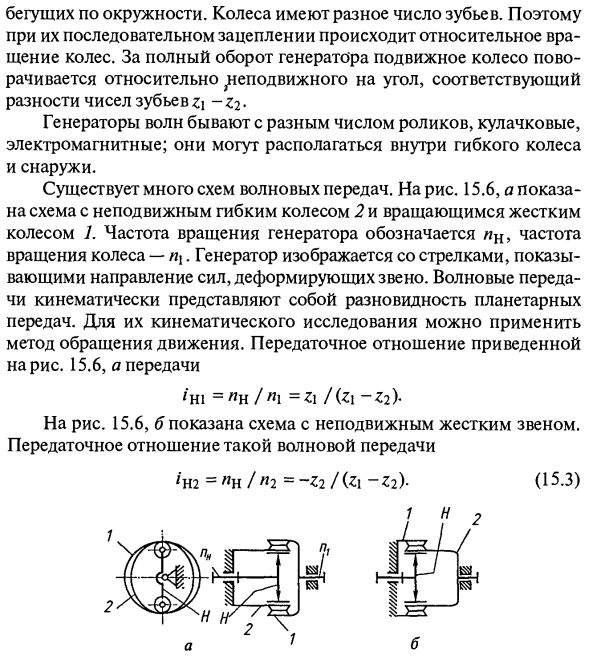
Генератор обозначен стрелкой, указывающей направление силы, которая деформирует звено. Кинематическая передача волн — это тип планетарной передачи. В исследованиях кинематики вы можете применить метод разворота движения. Передаточное число показано на рисунке 15,6, а передача ‘HI = «n /» 1 = ZI / (Zi -z2 \ На рисунках 15.6 и b показана фиксированная жесткая связь. Передаточное число такой передачи волны (15,3) ‘H2 = «n /» 2 = ~ Z2 / (Zi -Z2 \ Символ «-» в уравнении (15.3) указывает, что гибкая связь и генератор волн вращаются в разных направлениях. Разница в количестве зубов (fo-zi) занимает кратное число y волн.
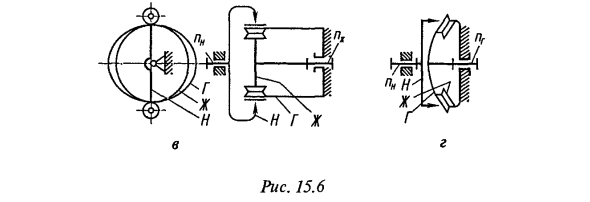
Кратное число 2 для 2-волновых передач и кратное 3 для 3-волновых передач. Обычно для конкретного передаточного числа * число зубьев на гибком колесе равно q =, а число зубьев на жестком колесе равно Z \ = Z2 + (Z \ -Z2) = Zi + j- На фиг.1 показана система передачи волн (с подвижным жестким колесом W), в которой ролик генератора прижимается к внешней поверхности цилиндра неподвижного подвижного звена. 15.6, с. На фиг.15.6, g показан вид с плоским гибким колесом G с зубцами на торце. Жесткое колесо W не двигается, и на конической поверхности имеются зубья. Толщина тонкой стенки обеспечивает гибкость гибкого колеса.
- Следовательно, мелкая единица зубьев см-0,2. D8mm используется. Количество зубьев z-i гибкого колеса составляет от 100 до 600. При Zi <100 модуль сцепления должен быть увеличен, и наблюдаются радиальная деформация и повышенное напряжение изгиба. Когда Zi> 600, коэффициент зацепления уменьшается и зуб скользит под нагрузкой. Для устройств передачи мощности гибкие колеса изготовлены из высококачественной среднеуглеродистой стали (40Х, 30ХГС, ШХ15) с последующей термообработкой, а в кинематических трансмиссиях используется пластик. До 40% от общего количества зубов могут быть задействованы одновременно.
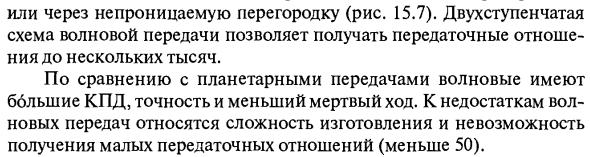
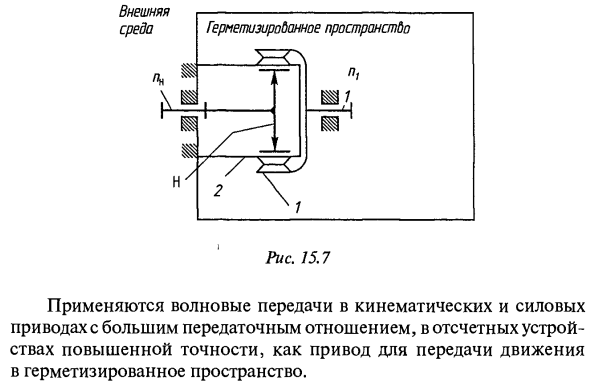
Волновой зубчатый механизм имеет несколько преимуществ. Большое передаточное число при небольших габаритах и весе (50-250 для одной передачи). Высокая точность и плавность благодаря уменьшению общей погрешности, когда задействованы многие зубы. Минимальный люфт, высокая эффективность (0,7 … 0,9) благодаря низкой скорости скольжения сетки. Функция для передачи вращательного движения в закрытое пространство Или через непроницаемый раздел (рисунок 15.7). При использовании двухступенчатой системы передачи волн максимальное передаточное число может достигать нескольких тысяч.
Это обеспечивает значительную разгрузку небольших модульных зубов. Людмила Фирмаль
По сравнению с планетарными зубчатыми колесами волновые зубчатые колеса более эффективны, точны и имеют меньший мертвый ход. К недостаткам передачи волн относятся сложность изготовления и невозможность получить малые передаточные числа (менее 50). Рисунок 15.7 Волновые передачи используются в кинематике и силовых приводах с высоким передаточным отношением, а также в высокоточных устройствах считывания в качестве привода для передачи движения в замкнутое пространство.
Смотрите также:
Решение задач по прикладной механике
| Кинематика планетарных редукторов | Кинематика винтовых механизмов |
| Определение чисел зубьев колес планетарных редукторов | Точность винтовых механизмов |
