
Оглавление:


Соприкосновение твердых тел в физике
- Твердый контакт. Как видно из уравнения, условие равновесия твердого тела Соотношение движения (34.1) и (34.3) может быть сформулировано как равное нулю полной силы, действующей на него, и полного момента силы. F = Јf = 0, k = Ј [rf] = 0. (38,1)
Общее количество всех связанных с ними сделано здесь lu — внешняя сила, r — радиус-вектор «точки приложения» Сила, в этом случае точка (начало), относительная Группа моментов определена, ее можно выбрать произвольно: F = 0, значение K не зависит от этого выбора (см. (34.5)).
должно выполняться индивидуально для каждого тела Людмила Фирмаль
При работе с твердыми системами, которые находятся в контакте друг с другом, в равновесии условие (38.1) . В этом случае количество сил Должны также включать силы, действующие на данный Тело другого тела, которое соприкасается с ним. Эти силы применяются и вызываются в точках контакта с телом.
Сила реакции. Силы взаимного реагирования каждого из двух объектов равны по величине, Направление. В общем, как величина, так и направление реакции Определяется совместным решением системы уравнений равновесия (38.1) для всех объектов. В некоторых случаях Однако направление силы реакции уже определяется условиями задачи.
- Поэтому, когда два тела могут свободно скользить по поверхности Между собой силы реакции между ними направлены перпендикулярно поверхности. При касании предметы двигаются относительно друг друга В дополнение к друзьям и силам реакции также возникают диссипативные и фрикционные силы. Возможны два типа контактных движений тела.
Скольжение и катание. При скольжении реакция перпендикулярна поверхности контакта, а сила трения Исправлено касательной к ним. Чистая прокатка характеризуется тем, что нет относительного движения объекта в точке контакта. Другими словами Элементы качения в каждой точке остаются неподвижными в точке контакта. В этом случае направление силы реакции произвольно, т.е. смежно друг с другом не всегда нормально На поверхности.
Если трение во время скольжения очень мало и его можно игнорировать Людмила Фирмаль
Трение при прокатке проявляется в виде дополнительного момента, препятствующего качению. , поверхность тела называется абсолютной Но гладко. И наоборот, если свойства поверхности допускают только чистую прокатку нескользкого предмета и трение во время прокатки можно игнорировать, поверхность считается абсолютно шероховатой.
В любом случае сила трения не проявляется четко. Поэтому в отношении движения тела задача является чисто механической. Когда определенные характеристики трения важны В случае движения последний больше не является чисто механическим процессом (см. § 25). Контакт с телом уменьшает количество степеней свободы По сравнению с тем, что они имеют в свободном движении.
Пока что при рассмотрении этих вопросов Этот факт был учтен путем введения координат, которые непосредственно соответствуют фактическим степеням свободы. Однако, если тело вращается, такой выбор координат может быть невозможен. Условием движения объекта качения является то, что скорость точки контакта равна (таким образом, Укажите скорость, когда тело катится по неподвижной поверхности Тач должен быть ноль).
В общем случае такое условие представляется уравнением связи вида 5 ^ CociQi-0, (38,2) г Cm — только координатная функция (индекс нумерует уравнение ограничения). Если левая сторона равенства не идеальна Производная по времени любой координатной функции Эти уравнения не могут быть интегрированы.
Другими словами, невозможно уменьшить только соотношение между координатами, которое можно использовать для представления положения тела с меньшим числом координат в зависимости от фактической степени свободы. Такая связь называется неголономной (она связывает только системные координаты, а не голономику).
Например, рассмотрите возможность катания мяча по плоской поверхности. Как обычно, переведите скорость (центральную скорость мяча) в V, в угол Скорость вращения этого. Введите r = —ap в общей формуле, чтобы получить скорость точки контакта между шаром и плоскостью. v = V + [ftr] (a — радиус шара, n — единичный вектор нормали На поверхности катания в точке контакта).
Требуемое соединение задается уравнением без скольжения в точке контакта, т.е. V-a [Pn] = 0. (38,3) Это не может быть интегрировано. Тем не менее, скорость V является полной производной по времени от радиус-вектора в центре шара, но угловая скорость обычно равна Для полной производной любой координаты. Следовательно, связь (38.3) неголономна х).
При таком количестве число координат не может быть уменьшено с помощью неголономных уравнений ограничения. Соединения должны использовать координаты, которые не являются независимыми. Вернитесь к принципу минимального действия еще раз, чтобы составить соответствующее уравнение Лагранжа. Наличие соотношения формы (38.2) накладывает определенные ограничения на возможные значения вариации координат.
Другими словами, умножение этих уравнений на δЈ показывает, что флуктуации в bqi не являются независимыми, а связаны отношениями. Y iCa.Mi = 0- (38,4) г Эта ситуация должна учитываться при изменении действия. Согласно общему лагранжеву методу нахождения условных экстремумов, изменение действия должно быть интегрировано «= / 2г> (Ј-! Ј) *
Добавьте уравнение (38.4), умноженное на неопределенный множитель (функция координат) Aa, и попросите, чтобы интеграл исчез. Кроме того, мы уже можем рассмотреть все BQI флуктуации являются независимыми и получить уравнение Вместе с уравнением ограничения (38.2) оно образует полную систему неизвестных qi и Aa. В описанном методе сила реакции не проявляется.
Контакт объекта полностью учитывается отношениями. Однако существует другой способ составления уравнения движения контактирующего объекта, и сила реакции вводится явно. Суть этого метода (содержание так называемого принципа Даламбера) заключается в Уравнение написано для каждого контакта ^ = E ф. ^ r = E [rf], (38-6)
Кроме того, количество сил, действующих на организм / Эти силы неизвестны заранее и определяются самими собой вместе с движениями тела в результате решения уравнения. Этот метод одинаково применим как к голономным, так и к неголономным ограничениям. Задание 1. Используйте принцип Даламбера, чтобы найти уравнение движения однородного шара, катящегося по плоскости под действием воздействия.
Внешняя сила F и момент K Решения. Выражение ограничения (38.3) уже описано в тексте. Введение силы реакции (обозначено буквой R), приложенной к точке контакта мяча Запишите уравнение (38.6), используя плоскость. n f = F + R, (1) = k «a nR (Здесь мы рассматриваем P = \ xV и сферический волчок M = IQ). различный Визуализация уравнения ограничения (38.3) во времени выглядит следующим образом: V = a [P n].
Подставляя в уравнение (1) и исключая с помощью (2), уравнение — (F + R) = [Kn] -aR + an (nR), Подключите силу реакции к F и K. Если это уравнение описано в компоненте и I = (2/5), CA2 заменяется (см. Задачу 2 b) §32), о _ ^ k JLx-y 7 i-L Luy-A7a * -Lr ^ X — 27 f-Y yV Rz = -F z (Плоскость xy выбрана в качестве плоскости прокатки).
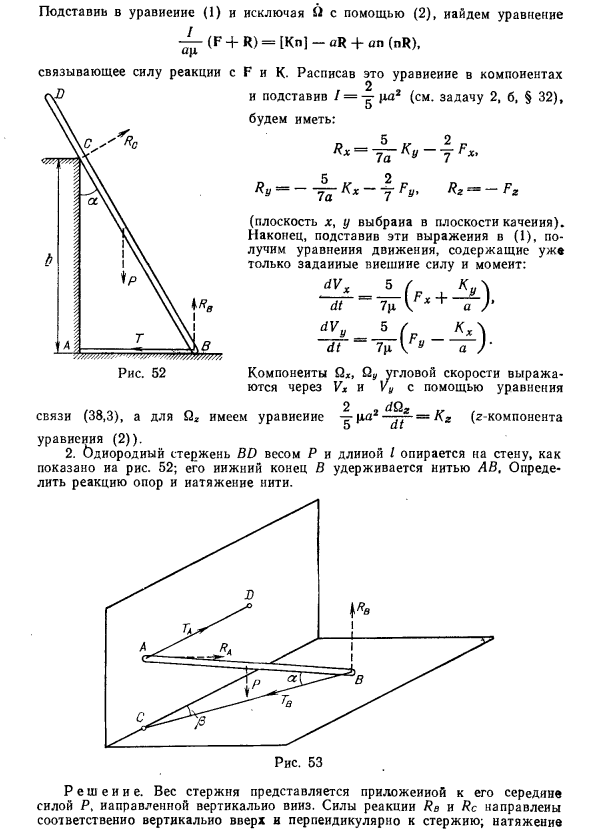
Наконец, подставляя эти уравнения в (1), только уравнение движения уже получено. Данные внешних сил и моментов: dVx 5 (тр г Ку A dVy _ 5 / _ K x y dt ~ 7 \ i \ x a) ‘dt ~ 7 \ i \ y Компонент угловой скорости Qy выражается в Vx и Vy с использованием D 2 2 dQ, z \ ± а Х \ а) Уравнение связи (38.3) К з 5 дт (Z является компонентом уравнения (2)). 2. P и длина I веса однородного стержня BD Прислонитесь к стене, как показано на рисунке. 52; его нижний конец B удерживается резьбой AB. Определите реакцию опоры и натяжение нити.
Решения. Кажется, что вес стержня приложен к центру вертикально направленной вниз силой P. Силы реакции Rb и Rc равны Вертикально вверх и вертикально к стержню соответственно. Натяжение нити T — направление от B Перейти к А. Решение уравнения равновесия, P1 Rc = -inin 2a, Rb = P-Rc sin os, T = Rc cos os. 4 часа
3. Стержень АВ измерительный Р Наклон по горизонтали и вертикали В этом положении удерживаются плоскость (рис. 53) и две горизонтальные нити AD BC \ BC нить находится в одной (вертикальной) плоскости С прутом АВ. Определите реакцию опоры и натяжение нити. Решения. напряжение Резьба Ta PTV 53 с рисунка А D и B до C. Реакции Ra и Rb соответствуют Самолет.
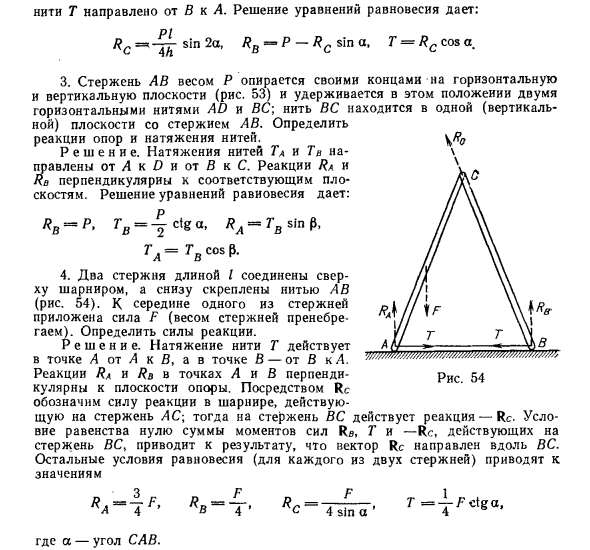
Решение уравнения равновесия, Rb = P, tv = -ctg os, Ra = Tv sin (3, Ta = Tv cos (3. 4. Подсоедините два стержня L-образной длины с петлями сверху и закрепите их винтами AB снизу (рис. 54). Сила F прикладывается к центру одного из стержней (Вес стержня игнорируется). Определить силу реакции. Решения.
Натяжение нити Т действует Точка A от A до A, и точка от B-от B до A. Доля Ra и Rb в точках A и B Для поддержки самолета. Ре есть Сила реакции шарнира, действующего на стержень переменного тока, тогда условие, что реакция –Re действует на стержень BC, является суммой моментов сил R b, T и –R e, действующих на стержень. BC приводит к тому, что вектор Re направлен вдоль BC. Оставшиеся условия равновесия (каждый из двух стержней) приводят к значению м ш ш ш ш ш м з Рисунок 54 Ra = -aF, Где-угол C AB. Rb = -, Rc = 4 sin os ’ T = -F ctg os
Смотрите также:
| Уравнения Эйлера в физике | Движение в неинерциальной системе отсчета |
| Асимметрический волчок в физике | Уравнения Гамильтона в физике |
Если вам потребуется помощь по физике вы всегда можете написать мне в whatsapp.
