

Силы, действующие на звенья механизма, и их классификация
Действующие на звенья механизма силы можно разделить на следующие группы.
Движущие силы  (или пары сил с моментом
(или пары сил с моментом  — это силы, элементарная работа которых на возможных перемещениях точек их приложения положительна. Движущие силы прикладываются к ведущим звеньям со стороны двигателей. Они предназначены для приведения машин в движение, преодоления сил сопротивления и осуществления заданного технологического процесса. В качестве приводных двигателей применяют двигатели внутреннего сгорания, электрические, гидравлические, пневматические и др.
— это силы, элементарная работа которых на возможных перемещениях точек их приложения положительна. Движущие силы прикладываются к ведущим звеньям со стороны двигателей. Они предназначены для приведения машин в движение, преодоления сил сопротивления и осуществления заданного технологического процесса. В качестве приводных двигателей применяют двигатели внутреннего сгорания, электрические, гидравлические, пневматические и др.
Силы сопротивления  (или пары сил сопротивления с моментом
(или пары сил сопротивления с моментом  ) — это силы, элементарная работа которых на возможных перемещения точек их приложения отрицательна. Они разделяются на силы производственных сопротивлений
) — это силы, элементарная работа которых на возможных перемещения точек их приложения отрицательна. Они разделяются на силы производственных сопротивлений  , для преодоления которых предназначен данный механизм, и силы вредных сопротивлений
, для преодоления которых предназначен данный механизм, и силы вредных сопротивлений  , вызывающие непроизводительные затраты энергии движущих сил.
, вызывающие непроизводительные затраты энергии движущих сил.
Силы производственных сопротивлений обусловлены технологическими процессами, поэтому их называют силами технологических сопротивлений. Обычно они приложены к выходным звеньям исполнительных машин. Силы вредного сопротивления — это в основном силы трения в кинематических парах и силы сопротивления среды. Понятие «вредные силы» является условным, так как в ряде случаев они обеспечивают работоспособность механизма (например, движение катка обеспечивают силы сцепления с дорожным полотном).
Силы веса звеньев  , в зависимости от направления их действия относительно направления движущих сил, могут быть полезными (или вредными), когда они способствуют (или препятствуют) движению механизма.
, в зависимости от направления их действия относительно направления движущих сил, могут быть полезными (или вредными), когда они способствуют (или препятствуют) движению механизма.
Силы инерции  или моменты сил инерции
или моменты сил инерции  возникающие при изменении скорости движения звеньев, могут быть как движущимися силами, так и силами сопротивления, в зависимости от направления движения звеньев.
возникающие при изменении скорости движения звеньев, могут быть как движущимися силами, так и силами сопротивления, в зависимости от направления движения звеньев.
В общем случае силы движущие и силы сопротивления являются функциями кинематических параметров (времени, координат, скорости, ускорения точки приложения силы). Эти функции для конкретных двигателей и рабочих машин называют их механическими характеристиками, которые задаются в аналитической форме или графически.
На рис. 1.20 показаны механические характеристики  электродвигателей различных типов.
электродвигателей различных типов.
Механическая характеристика электродвигателя постоянного тока с параллельным возбуждением (обмотка возбуждения двигателя включена параллельно обмотке якоря) имеет вид линейного монотонно
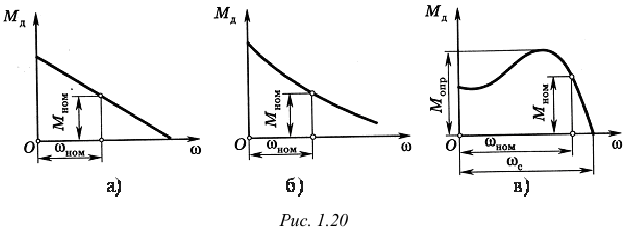
убывающей зависимости момента  от угловой скорости вращения вала
от угловой скорости вращения вала  (рис. 1.20, а). Двигатель с такой механической характеристикой устойчиво работает на всем диапазоне угловых скоростей .
(рис. 1.20, а). Двигатель с такой механической характеристикой устойчиво работает на всем диапазоне угловых скоростей .
Механическая характеристика электродвигателя постоянного тока с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря) представляется нелинейной зависимостью  , изображенной на рис. 1.20, б.
, изображенной на рис. 1.20, б.
Механическая характеристика асинхронного электродвигателя постоянного тока (рис. 1.20, в) описывается более сложной зависимостью. Характеристика имеет восходящую и нисходящие части. Областью устойчивой работы электродвигателя является нисходящая часть характеристики. Если момент сопротивления  становится больше максимального момента движущих сил
становится больше максимального момента движущих сил  двигатель останавливается. Такой момент называется опрокидывающим моментом
двигатель останавливается. Такой момент называется опрокидывающим моментом  . Угловая скорость
. Угловая скорость  , при котором двигатель развивает максимальную мощность, называется номинальной угловой скоростью, а соответствующий ей момент
, при котором двигатель развивает максимальную мощность, называется номинальной угловой скоростью, а соответствующий ей момент  — номинальным моментом. Угловая скорость
— номинальным моментом. Угловая скорость  , при которой
, при которой  , называется синхронной угловой скоростью.
, называется синхронной угловой скоростью.
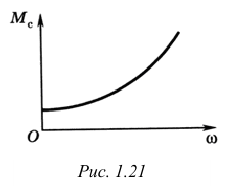
Механические характеристики рабочих машин чаще представляют собой восходящие кривые (рис. 1.21). Такой вид имеют характеристики компрессоров, центробежных насосов и др.
Эта теория взята со страницы лекций по предмету «прикладная механика»:
Возможно эти страницы вам будут полезны:
